- ಕನ್ನಡkannaḍa
-
EnglishDeutschItaliaFrançais한국의русскийSvenskaNederlandespañolPortuguêspolski繁体中文SuomiGaeilgeSlovenskáSlovenijaČeštinaMelayuMagyarországHrvatskaDanskromânescIndonesiaΕλλάδαБългарски езикGalegolietuviųMaoriRepublika e ShqipërisëالعربيةአማርኛAzərbaycanEesti VabariikEuskeraБеларусьLëtzebuergeschAyitiAfrikaansBosnaíslenskaCambodiaမြန်မာМонголулсМакедонскиmalaɡasʲພາສາລາວKurdîსაქართველოIsiXhosaفارسیisiZuluPilipinoසිංහලTürk diliTiếng ViệtहिंदीТоҷикӣاردوภาษาไทยO'zbekKongeriketবাংলা ভাষারChicheŵaSamoa日本語SesothoCрпскиKiswahiliУкраїнаनेपालीעִבְרִיתپښتوКыргыз тилиҚазақшаCatalàCorsaLatviešuHausaગુજરાતીಕನ್ನಡkannaḍaमराठी
ಯಂತ್ರ ದೃಷ್ಟಿ ಮತ್ತು ದೃಶ್ಯಾಧಾರಗಳು: ಕಾರ್ಯ ನಿರ್ಧಾರಗಳು ಮತ್ತು ಅನ್ವಯಗಳು
ಕಟಾಲೋಗ್
ಯಂತ್ರ ದೃಷ್ಟಿ ಎಂದರೇನಿದು?
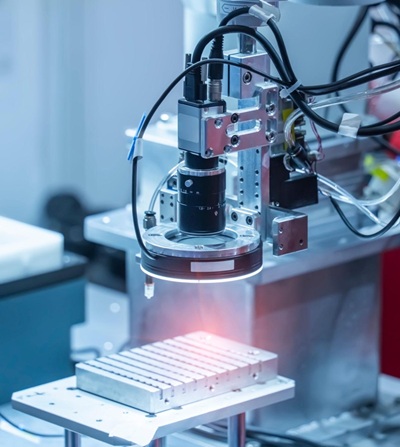
ಯಂತ್ರ ದೃಷ್ಟಿಯು ಯಂತ್ರಗಳಿಗೆ ವಾಸ್ತವಿಕ ವಿಶ್ವದ ವಸ್ತುಗಳ ಇಮೇಜ್ಗಳನ್ನು ಹಿಡಿಯುವುದು, ಪ್ರಕ್ರಿಯೆ ಮಾಡುವುದು ಮತ್ತು ವಿಶ್ಲೇಷಿಸಲು ಅನುಮತಿಸುವ ತಂತ್ರಜ್ಞಾನವಾಗಿದೆ. ಇದು ಕ್ಯಾಮೆರಾಗಳು, ಸಂತಕ್ಷೆಗಳು, ಆಪ್ಟಿಕಲ್ ಲೆನ್ಸ್ಗಳು, ಬೆಳಕು ವ್ಯವಸ್ಥೆಗಳು ಮತ್ತು ಇಮೇಜ್-ಪ್ರಾಸೆಸಿಂಗ್ ಸಾಫ್ಟ್ವೇರ್ ಅನ್ನು ಸಂಪೂರ್ಣವಾಗಿ ವಾಸ್ತವ ಮಾಹಿತಿಯನ್ನು ಸಂಗ್ರಹಿಸಲು ಮತ್ತು ಅದನ್ನು ಸ್ವಯಂ ನಿರ್ಧಾರಗಳಿಗಾಗಿ ಉಪಯುಕ್ತ ಡೇಟಾಗಾಗಿ ಮಾರ್ಪಡಿಸುತ್ತವೆ.
ಪ್ರಾಯೋಗಿಕ ಅನ್ವಯದಲ್ಲಿ, ಯಂತ್ರ ದೃಷ್ಟಿಯು ಮನುಷ್ಯ ವೀಕ್ಷಣೆಯನ್ನು ತಪ್ಪಿಸುವ ಹಲವಾರು ದೃಶ್ಯ ಪರಿಶೀಲನೆ ಮತ್ತು ಅಳೆಯುವ ಕಾರ್ಯಗಳನ್ನು ನಿರ್ವಹಿಸುತ್ತದೆ. ಉತ್ಪನ್ನವನ್ನು ವೀಕ್ಷಿಸಲು ಮತ್ತು ಅದರ ಶ್ರೇಣಿಯನ್ನು ನಿರ್ಧರಿಸಲು ವ್ಯಕ್ತಿಯ ಮೇಲೆ ಅವಲಂಬಿಸುವ ಬದಲು, ವ್ಯವಸ್ಥೆ ವಸ್ತುವಿನ ಸ್ಪಷ್ಟ ಇಮೇಜ್ ಅನ್ನು ದಾಖಲಿಸುತ್ತದೆ, ಆ ಇಮೇಜ್ ಅನ್ನು ಡಿಜಿಟಲ್ ಮಾಹಿತಿಯಂತೆ ಪರಿವರ್ತಿಸುತ್ತದೆ ಮತ್ತು ನಿರ್ದಿಷ್ಟ ದೃಶ್ಯ ವಿವರಗಳನ್ನು ಪರೀಕ್ಷಿಸುತ್ತದೆ. ಈ ವಿವರಗಳಲ್ಲಿ ಆಕಾರ, ಗಾತ್ರ, ಸ್ಥಳ, ಬಣ್ಣ, ಬೆಳಕು, ಗಡಿ, ಮಾದರಿ ಮತ್ತು ಹಾರ್ಡ್ಮೆಟ್ ಶ್ರೇಣಿಗಳನ್ನು ನಿರ್ವಹಿಸಬಹುದು. ಈ ಲಕ್ಷಣಗಳನ್ನು ವಿಶ್ಲೇಷಿಸುವ ಮೂಲಕ, ವ್ಯವಸ್ಥೆಯು ವಸ್ತುವು ಪೂರ್ವನಿಯೋಜಿತ ಅಗತ್ಯಗಳಿಗೆ ಹೊಂದಿದೆಯೆ ಎಂದು ನಿರ್ಧರಿಸಲು ಸಾಧ್ಯವಾಗುತ್ತದೆ.
ಯಂತ್ರ ದೃಷ್ಟಿ ವ್ಯವಸ್ಥೆ ಹೇಗೆ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತದೆ
ಯಂತ್ರ ದೃಷ್ಟಿ ಕ್ರಮವು ತಾತ್ತ್ವಿಕ ಹಂತಗಳ ಸ್ವೀಕಾರವನ್ನು ಅನುಸರಿಸುತ್ತದೆ. ಮೊದಲನೆಯದಾಗಿ, ವಸ್ತು ಪರಿಶೀಲನಾ ಪ್ರದೇಶಕ್ಕೆ ಪ್ರವೇಶಿಸುತ್ತದೆ ಮತ್ತು ನಿಯಂತ್ರಿತ ಬೆಳಕು ಮೂಲವನ್ನು ಬಳಸಿಕೊಂಡು ಬೆಳಗಿಕೊಳ್ಳುತ್ತದೆ. ಸರಿಯಾದ ಬೆಳಕು ಪ್ರಮುಖ ದೃಶ್ಯ ಲಕ್ಷಣಗಳನ್ನು ಅನಾವರಣಗೊಳಿಸಲು ಸಹಾಯಿಸುತ್ತದೆ ಮತ್ತು ಇಮೇಜ್ ಗುಣಮಟ್ಟವನ್ನು ಸಮಸ್ಯೆಗೆ ಕೊಂಡೊಯ್ಯುವ ನಿಸರ್ಗಕಾಲಗಳನ್ನು ಕಡಿಮೆ ಮಾಡುತ್ತದೆ.
ನಂತರ, ಕ್ಯಾಮೆರಾ ವಸ್ತುವಿನ ಸ್ಪಷ್ಟ ಕೋನ ಮತ್ತು ಅಂತರದಿಂದ ಇಮೇಜ್ ಅನ್ನು ಹಿಡುಕೊಳ್ಳುತ್ತದೆ. ಹಿಡಿದ ಇಮೇಜ್ ನಂತರ ಡಿಜಿಟಲ್ ಪಿಕ್ಸೆಲ್ ಡೇಟಾದಲ್ಲಿ ಪರಿವರ್ತಿತಗೊಳ್ಳುತ್ತದೆ, ಅಲ್ಲಿ ಹೆಚ್ಚಿನ ಪಿಕ್ಸೆಲ್ಗಳಲ್ಲಿ ಬೆಳಕು, ಬಣ್ಣ ಅಥವಾ ತೀವ್ರತೆಯ ಬಗ್ಗೆ ಮಾಹಿತಿಯನ್ನು ಒಳಗೊಂಡಿದೆ. ಈ ಡಿಜಿಟಲ್ ಇಮೇಜ್ ವಿಶ್ಲೇಷಣೆಗೆ ಇಮೇಜ್-ಪ್ರಾಸೆಸಿಂಗ್ ವ್ಯವಸ್ಥೆಗೆ ಪರಿವರ್ತಿತಗೊಳ್ಳುತ್ತದೆ.
ಸಾಫ್ಟ್ವೇರ್ ಇಮೇಜ್ ಅನ್ನು ತೀವ್ರವಾಗಿ ವ್ಯಾಖ್ಯಾನಿಸುತ್ತದೆ ಮತ್ತು ಎಡ್ಜ್ಗಳನ್ನು ಗುರುತಿಸುತ್ತದೆ, ರೂಪಗಳನ್ನು ಹೋಲಿಸುತ್ತದೆ, ಆಯಾಮಗಳನ್ನು ಅಳೆಯುತ್ತದೆ, ಬಣ್ಣದ ರಂಕಗಳನ್ನು ಶೋಧಿಸುತ್ತದೆ ಮತ್ತು ಮೆಟ್ಟಿಲುಗಳನ್ನು ಪರಿಶೀಲಿಸುತ್ತದೆ. ಇದು ಪ್ರತಿಯು ಪಿಕ್ಸೆಲ್ ಮಾದರಿಗಳನ್ನು ಮತ್ತು ತೀವ್ರತೆಯ ಮೌಲ್ಯಗಳನ್ನು ಪ್ರಕ್ರಿಯೆಗೊಳಿಸುತ್ತದೆ ಮತ್ತು ಅತ್ಯಂತ ಪ್ರಮುಖ ಮಾಹಿತಿಯನ್ನು ಪುಟಕ್ಕೆ ಪಡೆಯುತ್ತದೆ. ಇಕ್ಸ್ಟ್ರಕ್ತ್ಗಂಡ ಡೇಟಾ ನಂತರ ಪೂರ್ವನಿಯೋಜಿತ ಮಾನದಂಡಗಳು, ಮಿತಿಗಳು ಅಥವಾ ಪರಿಶೀಲನಾ ನಿಯಮಗಳಿಗೆ ವಿರುದ್ಧವಾಗಿ ಹೋಲಿಸಲಾಗುತ್ತದೆ, ವಸ್ತುವು ಅಗತ್ಯವಾದ ಮಾನದಂಡಗಳನ್ನು ಹೊಂದಿದೆಯೆ ಎಂದು ನಿರ್ಧರಿಸಲು.
ಯಂತ್ರ ದೃಷ್ಟಿಯ ಅನ್ವಯಗಳು ಮತ್ತು ಪ್ರಯೋಜನಗಳು
ವಿಶ್ಲೇಷಣೆ ಪೂರ್ಣಗೊಂಡ ನಂತರ, ವ್ಯವಸ್ಥೆ ಉದ್ಯೋಗಗಳು ವ್ಯಾಪಾರ ಕಾರ್ಯಗಳನ್ನು ಬೆಂಬಲಿಸಲು ಬಳಸಬಹುದಾದ ಫಲಿತಾಂಶಗಳನ್ನು ರಚಿಸುತ್ತದೆ. ಯಂತ್ರ ದೃಷ್ಟಿಯು ನಿಖರವಾದ ಅಳೆಯೋಣಗಳನ್ನು ನಿರ್ವಹಿಸಲು, ಮೆಟ್ಟಿಲು ದುರ್ಬಲರನ್ನು ಗುರುತಿಸಲು, ಉತ್ಪನ್ನದ ಗುಣಮಟ್ಟವನ್ನು ಪರಿಶೀಲಿಸಲು, ವಿಶೇಷ ಲಕ್ಷಣಗಳ ಆಧಾರದಲ್ಲಿ ವಸ್ತುಗಳನ್ನು ಶ್ರೇಣೀಬದ್ಧಗೊಳಿಸಲು, ವಸ್ತುಗಳ ಎಕ್ಸಕ್ಟ್ ಸ್ಥಾನವನ್ನು ನಿರ್ಧರಿಸಲು ಮತ್ತು ಹಿಡಿದಿಟ್ಟುಕೊಳ್ಳುವುದು ಅಥವಾ ಅಸೆಂಬ್ಲಿ ಕಾರ್ಯಗಳಲ್ಲಿ ರೈಬೋಟ್ ವ್ಯವಸ್ಥೆಗಳ ಮಾರ್ಗದರ್ಶನವನ್ನು ಒದಗಿಸುತ್ತದೆ.
ಯಂತ್ರ ದೃಷ್ಟಿಯು ವೇಗವಾಗಿ ಮತ್ತು ನಿರಂತರವಾಗಿ ಅಕಾಡೆಗಳಲ್ಲಿ ದೊಡ್ಡ ಸಂಖ್ಯೆಯ ವಸ್ತುಗಳನ್ನು ಪರಿಶೀಲಿಸಲು ಸಾಧ್ಯವಾದುದರಿಂದ, ಇದು ನಿರ್ಧಿಷ್ಟತೆ, ಸಮರ್ಥತೆ, ಮತ್ತು ಉತ್ಪಾದನಾ ವಿಶ್ವಾಸಾರ್ಹತೆಯನ್ನು ಸುಧಾರಿಸಲು ಸಹಾಯ ಮಾಡುತ್ತದೆ. ವಾಸ್ತವಿಕ ಸಮಯದಲ್ಲಿ ವಿಸ್ತೃತ ಪರಿಶೀಲನೆಗಳನ್ನು ನಿರ್ವಹಿಸಲು ಅದರ ಶಕ್ತಿಯು ಅದನ್ನು ನಿಖರವಾದ ತಂತ್ರಜ್ಞಾನವಾಗಿರಿಸುತ್ತದೆ, ಏಕೆಂದರೆ ಇದು ಉತ್ಪಾದನೆಯಲ್ಲಿ, ಕೈಗಾರಿಕಾ ಸ್ವಯಂಚಾಲಿತದಲ್ಲಿ, ರೊಬೋಟಿಕ್ಸ್ನಲ್ಲಿ, ಪ್ಯಾಕೇಜಿಂಗ್ನಲ್ಲಿ, ಎಲೆಕ್ಟ್ರಾನಿಕ್ ಉತ್ಪಾದನೆಯಲ್ಲಿ ಮತ್ತು ಗುಣಮಟ್ಟದ ನಿಯಂತ್ರಣ ಪದ್ಧತಿಗಳಲ್ಲಿ ಪ್ರಮುಖವಾಗಿದೆ.
ಯಂತ್ರ ದೃಷ್ಟಿ ವ್ಯವಸ್ಥೆಯ ಸಂಯೋಜನೆ
ಯಂತ್ರ ದೃಷ್ಟಿ ವ್ಯವಸ್ಥೆಯು ವಸ್ತುಗಳನ್ನು ಸ್ವಯಂಚಾಲಿತವಾಗಿ ಪರಿಶೀಲಿಸಲು, ಅಳತೆಯನ್ನು ಕಾಯ್ದುಕೊಳ್ಳಲು, ಗುರುತಿಸಲು, ಮತ್ತು ಫಾಲೋ ಮಾಡಲು ಒಟ್ಟಾಗು ಅಂತಾರಾಷ್ಟ್ರೀಯ ಮತ್ತು ಐಟಿ ಕೂಕೋ ವರ್ಷದ ಹಲವಾರು ಹಾರ್ಡ್ವೇರ್ ಮತ್ತು ಸಾಫ್ಟ್ವೇರ್ ಭಾಗಗಳನ್ನು ಒಳಗೊಂಡಿದೆ. ಪ್ರತಿಯೊಂದು ಅಂಗವು ಪರಿಶೀಲನಾ ಪ್ರಕ್ರಿಯೆಯಲ್ಲಿರುವ ಒಂದು ನಿರ್ದಿಷ್ಟ ಕಾರ್ಯವನ್ನು ನಿರ್ವಹಿಸುತ್ತದೆ. ಒಂದು ವಸ್ತು ಪರಿಶೀಲನಾ ಪ್ರದೇಶಕ್ಕೆ ಪ್ರವೇಶಿಸುವ ಕ್ಷಣದಿಂದ ತೀರ್ಮಾನ ಕೈಗೊಳ್ಳುವ ಕ್ಷಣಕ್ಕೆ, ಮಾಹಿತಿಯ ಅಂತಾರಾಷ್ಟ್ರೀಯ ಹಂತಗಳಲ್ಲಿ ಹರಿಯುತ್ತದೆ. ಈ ಹಂತಗಳಲ್ಲಿ ವಸ್ತು ಪತ್ತೆ, ಚಿತ್ರ ಸಂಪಾದನೆ, ಚಿತ್ರ ಸ್ಫೂರ್ತಿಸಲು, ಚಿತ್ರ ಮಾಹಿತಿಗಳನ್ನು ಸಂಸ್ಕರಿಸಲು, ಫಲಿತಾಂಶವನ್ನು ತಯಾರಿಸಲು, ಮತ್ತು ಉಪಕರಣದ ನಿಯಂತ್ರಣ ಸೇರಿವೆ.
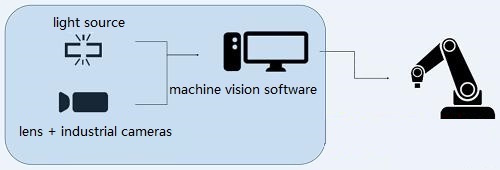
ನಿಖರ ಮತ್ತು ವಿಶ್ವಾಸಾರ್ಹ ಪರಿಶೀಲನೆಗಾಗಿ, ಪ್ರತಿಯೊಂದು ಅಂಗವು ಸಹಕಾರದಲ್ಲಿ ಕಾರ್ಯ ನಿರ್ವಹಿಸಬೇಕು. ಚಿತ್ರ ಸೆರೆಹಿಡಿಯುವಲ್ಲಿ ದಿಕ್ಕು, ಶ್ರೇಯಸ್ಸು, ಅಥವಾ ಅಸಾಕ್ಷರ ವೇದಿಕೆಯು ಅಂತಿಮ ಫಲಿತಾಂಶದ ಗುಣಮಟ್ಟವನ್ನು ಪ್ರಭಾವಿತ ಮಾಡಬಹುದು. ಆದ್ಕಾರವಾಗಿ, ಸಂಪೂರ್ಣ ವ್ಯವಸ್ಥೆಯ ಕಾರ್ಯಕ್ಷಮತೆ ಈ ಎಲ್ಲಾ ಭಾಗಗಳು ಒಟ್ಟಿಗೆ ಹೇಗೆ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತವೆ ಎಂಬುದರ ಮೇಲೆ ಅವಲಂಬಿತವಾಗಿದೆ.
ಕ್ಯಾಮೆರಾ ಮತ್ತು ಲೆನ್ಸ್
ಕ್ಯಾಮೆರಾ ಮತ್ತು ಲೆನ್ಸ್ ಯಂತ್ರ ದೃಷ್ಟಿ ವ್ಯವಸ್ಥೆಯ ಚಿತ್ರ ಸಂಪಾದನೆ ವಿಭಾಗವನ್ನು ರೂಪಿಸುತ್ತವೆ. ಅವರ ಕೆಲಸವು ಪರಿಶೀಲಿಸಲ್ಪಡುವ ವಸ್ತುವಿನ ಸ್ಪಷ್ಟ ಮತ್ತು ವಿವರವಾದ ಚಿತ್ರವನ್ನು ಸೆರೆಹಿಡಿಯುವುದು.
ಪ್ರಕ್ರಿಯೆವು ವಸ್ತುವಿನ ಮೇಲ್ಮಟ್ಟದಿಂದ ವಿಫಲವಾದ ಬೆಳಕು ಲೆನ್ಸ್ಗೆ ತಲುಪುವಾಗ ಪ್ರಾರಂಭವಾಗುತ್ತದೆ. ಲೆನ್ಸ್ ಈ ಬೆಳಕನ್ನು ಮೆಣಸು ಮಾಡುತ್ತದೆ ಮತ್ತು ಕ್ಯಾಮೆರಾ ಸೆನ್ಸರ್ಗೆ ಕೇಂದ್ರೀಕರಿಸುತ್ತದೆ. ಈ ಕೇಂದ್ರೀಕರಣದ ಗುಣಮಟ್ಟ ನೇರವಾಗಿ ಚಿತ್ರ ಚುರುಕಿನ ಮೇಲೆ ಪರಿಣಾಮ ಬೀರಿಸುತ್ತದೆ. ಚಿತ್ರ ಮರ್ಪಾಗಿತ್ತಾದರೆ, ಕುಲ ಅಸ್ಪಷ್ಟತೆಗಳು, ಕಡೆಯವರು, ಅಂಕಣಗಳು ಅಥವಾ ಆಯಾಮದ ವಿವರಗಳನ್ನು ಪತ್ತೆಹಚ್ಚುವುದು ಕಷ್ಟವಾಗಬಹುದು.
ಬೆಳಕು ಸೆನ್ಸರ್ಗೆ ತಲುಪಿದ ನಂತರ, ಕ್ಯಾಮೆರಾ ಆಪ್ಟಿಕಲ್ ಇಮೇಜ್ ಅನ್ನು ಡಿಜಿಟಲ್ ಇಮೇಜ್ ಡೇಟಾದಲ್ಲಿಗೆ ಪರಿವರ್ತಿಸುತ್ತದೆ. ಈ ಮಾಹಿತಿಯು ವಸ್ತುವಿನ ದೃಶ್ಯ ಲಕ್ಷಣಗಳನ್ನು ಪ್ರತಿಬಿಂಬಿಸುವ ಸಾವಿರಾರು ಅಥವಾ ಸಮೀಪದ ಮಿಲಿಯನ್ ಪಿಕ್ಸೆಲ್ನಲ್ಲಿ ಅಕ್ಕ ಪಕ್ಷಿಯಾಗಿ ಇದೆ. ಈ ಚಿತ್ರವನ್ನು ನಂತರ ದೃಷ್ಟಿ ವ್ಯವಸ್ಥೆಯ ಮೂಲಕ ಸಂಸ್ಕರಣೆಗಾಗಿ ಸಿದ್ಧಪಡಿಸಲಾಗುತ್ತದೆ.
ವಿಭಿನ್ನ ಪರಿಶೀಲನಾ ಕಾರ್ಯಗಳಿಗೆ ವಿಭಿನ್ನ ಕ್ಯಾಮೆರಾ ಸಂರಚನೆಗಳು ಅಗತ್ಯವಿದೆ. ಒಂದು ವಸ್ತುವಿನ ಕೇವಲ ಒಂದು ದೃಶ್ಯವನ್ನು ಅಗತ್ಯವಿದ್ದಾಗ ಹೆಚ್ಚಾಗಿ ಒಂದೇ ಕ್ಯಾಮೆರಾ ವ್ಯವಸ್ಥೆ ಸಾಕಾಗಬಹುದು. ಆದರೆ, ನಂಟಿರುವ ಶ್ರೇಣಿಯ ವಸ್ತುಗಳು ಸಾಮಾನ್ಯವಾಗಿ ವಿಭಿನ್ನ ಕೋನಗಳಲ್ಲಿ ಅಣೆಕಟ್ಟಿನ ಕ್ಯಾಮೆರಾಗಳನ್ನು ಅಗತ್ಯವಿರುತ್ತದೆ. ಇದರಿಂದ ವ್ಯವಸ್ಥೆ ಒಂದೇ ಸಮಯದಲ್ಲಿ ಹಲವಾರು ಪರಿಧಿಗಳನ್ನು ಪರಿಶೀಲಿಸಲು, ಅಂಗಸಧಾನಿಗಳನ್ನು ದೂರಗೊಳಿಸಲು, ಮತ್ತು ಹೆಚ್ಚು ಸಂಪೂರ್ಣ ಮಾಹಿತಿಯನ್ನು ಸೆರೆಹಿಡಿಯುವುದು ಸಾಧ್ಯವಾಗುತ್ತದೆ.
ಯಂತ್ರ ದೃಷ್ಟಿ ಕ್ಯಾಮೆರಾಗಳು ಬಹಳಷ್ಟು ರೀತಿಗಳಲ್ಲಿ ಲಭ್ಯವಿದ್ದು, ಅವುಗಳಲ್ಲಿ ಮೋನೋಕ್ರೋಮ್ ಕ್ಯಾಮೆರಾಗಳು, ಶ್ರೇಣೀ ಬಣ್ಣ ಕ್ಯಾಮೆರಾಗಳು, ರೇಖಾ-ಸ್ಕಾನ್ ಕ್ಯಾಮೆರಾಗಳು, ಪ್ರದೇಶ-ಸ್ಕಾನ್ ಕ್ಯಾಮೆರಾಗಳು, ಪ್ರಗತಿಶೀಲ-ಸ್ಕಾನ್ ಕ್ಯಾಮೆರಾಗಳ ಮತ್ತು ಉನ್ನತ-ರೊಜಿನೇಶನ್ ಕ್ಯಾಮೆರಾಗಳು ಸೇರಿವೆ. ಆಯ್ಕೆಯು ವಸ್ತುವಿನ ಗಾತ್ರ, ಉತ್ಪಾದನಾ ವೇಗ, ಅಗತ್ಯವಿರುವ ಚಿತ್ರ ಮಾಹಿತಿ, ದೃಶ್ಯದ ಶ್ರೇಣಿಯ ವ್ಯಾಪ್ತಿ ಮತ್ತು ಅಳತೆಯ ನಿಖರತೆಯಂತಹ ಅಂಶಗಳ ಮೇಲೆ ಅವಲಂಬಿತವಾಗಿದೆ.
ಬೆಳಕು ಮೂಲ
ಬೆಳಕು ಮೂಲವು ಯಂತ್ರ ದೃಷ್ಟಿ ವ್ಯವಸ್ಥೆಯಲ್ಲಿ ಬಹಳ ಮುಖ್ಯವಾದ ಭಾಗಗಳಲ್ಲಿ ಒಂದಾಗಿದೆ ಏಕೆಂದರೆ ಚಿತ್ರ ಗುಣಮಟ್ಟವು ಶ್ರೇಯಸ್ಸಿನ ಮೇಲೆ ಬಹಳ ಹೆಚ್ಚು ಅವಲಂಬಿತವಾಗಿದೆ.
ಚಿತ್ರವನ್ನು ಸೆರೆಹಿಡಿಯುವುದಕ್ಕೂ ಮುನ್ನ, ವಸ್ತುವನ್ನು ನಿಯಂತ್ರಿತ ಮತ್ತು ನಿರಂತರ ರೀತಿಯಲ್ಲಿ ಬೆಳೆಯಬೇಕು. ಉದ್ದೇಶವು ವಸ್ತುವನ್ನು ಕೇವಲ ದೃಶ್ಯವಾಗಿ ಪುನಾವುತ್ತ ಮಾಡುವುದಲ್ಲ, ಬೆಳಕು ಪರಿಶೀಲಿಸಬೇಕಾದ ಲಕ್ಷಣಗಳನ್ನು ಸ್ಪಷ್ಟವಾಗಿ ತೋರಿಸಬೇಕಾಗಿದೆ. ಈ ಲಕ್ಷಣಗಳಲ್ಲಿ ಕಡೆಯವರು, ಕೀಲುಗಳು, ಬಿಲ್ಲುಗಳು, ಮೇಲ್ಮಟ್ಟದ ಬಣ್ಣ, ಮುದ್ರಿತ ಅಕ್ಷರಗಳು, ಲೇಬಲ್ಗಳು, ಬಣ್ಣದ ವ್ಯತ್ಯಾಸಗಳು ಅಥವಾ ಆಯಾಮದ ಗಡಿಗಳು ಸೇರಬಹುದು.
ಸರಿಯಾದ ಬೆಳಕು ಚಿತ್ರದ ವರ್ಣಕಾಂತವನ್ನು ಹೆಚ್ಚಿಸುತ್ತದೆ ಮತ್ತು ಪ್ರಮುಖ ವಿವರಗಳನ್ನು ಹಕ್ಕು ಮುಚ್ಚಿಸುವುದರಿಂದ ಮಹತ್ವದ ವಿಷಯವನ್ನು ಹೊರಹೊಮ್ಮಿಸುತ್ತದೆ. ಉದಾಹರಣೆಗೆ, ಕಬ್ಬಿಣದ ಮೇಲ್ಮಟ್ಟದಲ್ಲಿ ಒಂದು ಸಣ್ಣ ಕೆಳಗೆ ದಾಖಲಾಗುವುದು, ಸಾಮಾನ್ಯ ಶ್ರೇಯಸ್ಸಿನಲ್ಲಿ ಪತ್ತೆಹಚ್ಚುವುದು ಕಷ್ಟ ಆಗಬಹುದು ಆದರೆ ವಿಶೇಷ ತಿರುಗಿಲ್ಲಿಂದ ಬೆಳಕಿನ ಮೇರೆಗೆ ಬಹಳವಾಗಿ ಗೋಚರವಾಗಬಹುದು.
ಸಾಮಾನ್ಯ ಬೆಳಕು ತಂತ್ರಜ್ಞಾನಗಳಲ್ಲಿ LED ಬೆಳಕು, ಫ್ಲೊರೆಸೆಂಟ್ ಬೆಳಕು, ಫೈಬರ್-ಒಪ್ಟಿಕ್ ಬೆಳಕು, ಮತ್ತು ಹ್ಯಾಲೊಜೆನ್ ಬೆಳಕು ಸೇರಿವೆ. ಈ ಆಯ್ಕೆಯಲ್ಲಿ, LED ಬೆಳಕು ವ್ಯಾಪಕವಾಗಿ ಬಳಸಲಾಗುತ್ತದೆ ಏಕೆಂದರೆ ಇದು ಸ್ಥಿರ ಜ್ವಾಲೆ, ಉದ್ದ ಬಾಳ್ಕಾಲ ಮತ್ತು ಕಡಿಮೆ ನಿರ್ವಹಣಾ ಅವಶ್ಯಕತೆಯನ್ನು ಒದಗಿಸುತ್ತದೆ.
ಬೆಳಕು ವಿಧಾನವನ್ನು ವಸ್ತುವಿನ ಪದಾರ್ಥ, ಬಣ್ಣ, ಮೇಲ್ಮಟ್ಟದ ತೋಳಈ, ಪ್ರತಿಬಿಂಬ, ರೂಪ, ಮತ್ತು ಪರಿಶೀಲನಾ ಕೋನದಂತಹ ಹಲವು ಅಂಶಗಳ ಆಧಾರದ ಮೇಲೆ ಆಯ್ಕೆ ಮಾಡಲಾಗುತ್ತದೆ. ಚೆನ್ನಾಗಿ ವಿನ್ಯಾಸಗೊಳಿಸಿದ ಬೆಳಕು ನೆರವುಗಳನ್ನು ಕಡಿಮೆ ಮಾಡುತ್ತದೆ ಮತ್ತು ಹೆಚ್ಚು ಪತ್ತೆಗೊಳ್ಳುವಿಕೆ ದೃಷ್ಟಿ ಮಾಡುತ್ತದೆ.
ಸೆನ್ಸಾರ್ಗಳು
ಸೆನ್ಸಾರ್ಗಳು ಚಿತ್ರ ಸಂಪಾದನೆ ಪ್ರಾರಂಭವಾಗುವ ಮೊದಲು ವಸ್ತುವಿನ ಉಪಸ್ಥಿತಿ, ಸುರಕ್ಷಿತ ಸ್ಥಳ ಅಥವಾ ಚಲನೆಯನ್ನ ಪತ್ತೆ ಹಚ್ಚಲು ಜವಾಬ್ದಾರಿಯಾಗಿವೆ.
ಸಾಮಾನ್ಯ ಉತ್ಪಾದನಾ ಸಾಲಿನಲ್ಲಿ, ಉತ್ಪನ್ನಗಳು ನಿರಂತರವಾಗಿ ಒಂದು ಕಾನ್ವೇಯರ್ ಅಥವಾ ಸ್ವಾಯತ್ತ ಹ್ಯಾಂಡ್ಲಿಂಗ್ ವ್ಯವಸ್ಥೆಯ ಮೂಲಕ ಚಲಿಸುತ್ತವೆ. ಕ್ಯಾಮೆರಾ ಸರಿಯಾದ ಕ್ಷಣದಲ್ಲಿ ಚಿತ್ರವನ್ನು ಸೆರೆಹಿಡಿಯಬೇಕು. ಚಿತ್ರವನ್ನು ತುಂಬಾ ಮೊದಲು ಅಥವಾ ತುಂಬಾ ಮೇಲಾಗಿದ್ದರೆ, ಮಹತ್ವದ ಪರಿಶೀಲನಾ ಪ್ರದೇಶಗಳನ್ನು ತಪ್ಪಿಹೋಗಬಹುದು.
ಈ ಸಮಸ್ಯೆ ನಿವಾರಿಸಲು, ಒಂದು ಸೆನ್ಸಾರ್ ವಸ್ತುವಿನ ಚಲನವಲನವನ್ನು ಮೇಲ್ವಿಚಾರಿಸುತ್ತದೆ ಮತ್ತು ಅದು ಪರಿಶೀಲನಾ ಸ್ಥಳವನ್ನು ತಲುಪಿದಾಗ ನಿರ್ಧರಿಸುತ್ತದೆ. ವಸ್ತು ಜಾಗದಲ್ಲಿ ತಲುಪಿದಾಗ, ಸೆನ್ಸಾರ್ ಕ್ಯಾಮೆರಾಕ್ಕೆ ಉತ್ತೇಜನ ಸಂಕೇತವನ್ನು ಕಳುಹಿಸುತ್ತದೆ.
ಸಾಮಾನ್ಯ ಸೆನ್ಸಾರ್ ಪ್ರಕಾರಗಳಲ್ಲಿ ಕಂಬನಿ ಸೆನ್ಸಾರ್ಗಳು, ಸಮೀಪ ಸೆನ್ಸಾರ್ಗಳು, ಬೆಳಕು ಪ್ರಭಾವಿತ ಸೆನ್ಸಾರ್ಗಳು, ಮತ್ತು ಬೆಳಕು ಪ್ರಭಾವಿತ ಸ್ವಿಚ್ಗಳನ್ನು ಒಳಗೊಂಡಿವೆ. ಈ ಸಾಧನಗಳು точный ಸಮಯ ಪ್ರಕಾರ ಮಾಹಿತಿ ಒದಗಿಸುತ್ತವೆ ಮತ್ತು ವಸ್ತು ಚಲನೆಯೊಂದಿಗೆ ಚಿತ್ರ ತೆಗೆದುಕೊಳ್ಳಲು ಸಿಂಕ್ರೊನೈಸ್ಗೊಳಿಸಲು ಸಹಾಯ ಮಾಡುತ್ತವೆ.
ಸೂಕ್ಷ್ಮ ಟಿಖನು ಕಡಿಮೆ ಮಾಡುವುದು ಚಲನೆಯ ಸಂಬಂಧಿತ ತಪ್ಪುಗಳನ್ನು ಕಡಿಮೆ ಮಾಡುತ್ತದೆ, ಚಿತ್ರ ಸಾಂದ್ರತೆಯನ್ನು ಸುಧಾರಿಸುತ್ತದೆ ಮತ್ತು ಪ್ರತಿ ವಸ್ತುವು ಒಂದೇ ಅunswickದಲ್ಲಿ ಪರಿಕ್ಷಿಸಲ್ಪಡುವುದನ್ನು ಖಾತರಿಪಡಿಸುತ್ತದೆ.
ಚಿತ್ರ ಹಿಡಿತ ಕಾರ್ಡ್
ಕ್ಯಾಮೆರಾ একটি ಚಿತ್ರವನ್ನು ಪಡೆಯುವ್ಯದ ಬಳಿಕ, ಚಿತ್ರ ಡೇಟಾವನ್ನು ಪ್ರಕ್ರಿಯಾ ಮತ್ತು ಮಾರ್ಗಸೂಚಿ ಕಾರ್ಡಿಗೆ ವರ್ಗಾಯಿಸಬೇಕಾಗಿದೆ. ಈ ಕಾರ್ಯವನ್ನು ಚಿತ್ರ ಹಿಡಿತ ಕಾರ್ಡ್ ಕಾರ್ಯಗತಗೊಳಿಸುತ್ತದೆ.
ಹಿಡಿತ ಕಾರ್ಡ್ ಕ್ಯಾಮರಾಗೆ ಆಸಪ್ತ ಚಿತ್ರ ಸಂಜ್ಞೆಗಳನ್ನು ಸ್ವೀಕರಿಸುತ್ತದೆ ಮತ್ತು ತಂತ್ರಾಂಶ ಮತ್ತು ದೃಷ್ಟಿ ಸಾಫ್ಟ್ವೇರ್ ಅಂಕಗಳನ್ನು ಪರಿಣಾಮವಾಗಿ ಸಂಸ್ಕರಿಸಲು ರೂಪಾಂತರಿಸುತ್ತದೆ. ಹೆಚ್ಚಿನ ವೇಗದ ಪರಿಶೀಲನೆಗಳಲ್ಲಿ, ದೊಡ್ಡ ಪ್ರಮಾಣದ ಕಡತದ ಡೇಟಾವನ್ನು ತ್ವರಿತವಾಗಿ ಮತ್ತು ವಿಶ್ವಾಸಾರ್ಹವಾಗಿ ವರ್ಗಾಯಿಸಬೇಕಾಗಿದೆ. ಹಿಡಿತ ಕಾರ್ಡ್ ಸ್ಥಿರ ಡೇಟಾ ವರ್ಗಾಯಿಸುವುದನ್ನು ನಿರ್ವಹಿಸಲು ಮತ್ತು ಚಿತ್ರ ನಷ್ಟವನ್ನು ತಡೆಯಲು ಸಹಾಯ ಮಾಡುತ್ತದೆ.
ಚಿತ್ರ ಡೇಟಾವನ್ನು ವರ್ಗಾಯಿಸಲು ಕಡತ ಕಾರ್ಡ್ ಬೆಂಬಲವನ್ನು ಪತ್ರಹೂಡುತ್ತದೆ, ಕ್ಯಾಮೆರಾ ಕಾರ್ಯಗಳನ್ನು ನಿರ್ವಹಿಸುತ್ತದೆ. ಈ ಕಾರ್ಯಗಳಲ್ಲಿ ಕ್ಯಾಮೆರಾ ಕಾರ್ಯಾಚರಣೆ, ಎಕ್ಸ್ಪೋಜರ್ ನಿಯಂತ್ರಣ, ಸಂಯೋಜನೆ ಕಾಲದ ಪರಿಷ್ಕರಣೆ, ಸಿಂಕ್ರೊನೈಸೇಶನ್, ಮತ್ತು ಶಟರ್ ನಿಯಂತ್ರಣವನ್ನು ಒಳಗೊಂಡಿರಬಹುದು.
ವಿಭಿನ್ನ ಹಿಡಿತ ಕಾರ್ಡ್ಗಳು ವಿಭಿನ್ನ ಸಂಪರ್ಕ ಮಾನದಂಡಗಳು ಮತ್ತು ಹಾರ್ಡ್ವೇರ್ ಇಂಟರ್ಫೇಸ್ಗಳನ್ನು ಬೆಂಬಲಿಸುತ್ತವೆ. ಸಾಮಾನ್ಯ ಕೈಗಾರಿಕ ಇಂಟರ್ಫೇಸ್ಗಳಲ್ಲಿ PCI, Compact PCI, PC104 ಮತ್ತು ಇತರ ಕೈಗಾರಿಕಾ ಸಂವಹನ ವೇದಿಕೆಗಳು ಒಳಗೊಂಡಿವೆ. ಆಯ್ಕೆ ಮಾಡಿದ ಇಂಟರ್ಫೇಸ್ ಕ್ಯಾಮೆರಾ ಮತ್ತು ಪ್ರಕ್ರಿಯೆ ಯಂತ್ರದೊಂದಿಗೆ ಹೊಂದಾಣಿಕೆ ಹೊಂದಿರಬೇಕು.
PC ವೇದಿಕೆ
ಕಂಪ್ಯೂಟರ್ ಯಂತ್ರದ ದೃಷ್ಟಿ ವ್ಯವಸ್ಥೆಯ ಕೇಂದ್ರ ಪ್ರಕ್ರಿಯಾ ಯಂತ್ರವಾಗಿ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತದೆ. ಇದು ಚಿತ್ರ ಡೇಟಾವನ್ನು ಸ್ವೀಕರಿಸುತ್ತದೆ, ಪರಿಶೀಲನೆ ಆಂತರಿಕಗಳನ್ನು ಕಾರ್ಯಗತಗೊಳಿಸುತ್ತದೆ, ಮಾಹಿತಿಯನ್ನು ಉಳಿಸುತ್ತವೆ, ಮತ್ತು ಬಾಕಿ ಯಂತ್ರಗಳಿಗೆ ಯಾಂತ್ರಿಕ ಫಲಿತಾಂಶಗಳನ್ನು ನೀಡುತ್ತದೆ.
ಚಿತ್ರ ಕ್ಯಾಮೆರಾಗೆ ಬರುವಾಗ, ಕಂಪ್ಯೂಟರ್ ಡೇಟಾವನ್ನು ಹಂತ ಹಂತವಾಗಿ ಆಕ್ರಮಣ ಮಾಡುತ್ತದೆ. ಇದು ಆಯಾಮಗಳನ್ನು ಅಳೆಯಬಹುದು, ನಿರ್ದಿಷ್ಟ ವೈಶಿಷ್ಟ್ಯಗಳನ್ನು ಹಾಜರು ಮಾಡಬಹುದು, ಮಾದರಿಗಳನ್ನು ಹೋಲಿಸುತ್ತದೆ, ದೋಷಗಳನ್ನು ಕಂಡುಹಿಡಿದರೆ, ಬಾರ್ಕೋಡ್ಗಳನ್ನು ಡಿಕೋಡ್ ಮಾಡುತ್ತದೆ, ಅಥವಾ ಉತ್ಪನ್ನದ ಗುಣಮಟ್ಟವನ್ನು ಖಚಿತಪಡಿಸುತ್ತದೆ. ಈ ಕಾರ್ಯಗಳನ್ನು ಉತ್ಪಾದನಾ ಮಾರ್ಗದ ವೇಗದೊಂದಿಗೆ ಹೊಂದಿಸಲು ಸಾಮಾನ್ಯವಾಗಿ ಕೊಂಚ ಸೆಕೆಂಡುಗಳ ಒಳಗೆ ಪೂರ್ಣಗೊಳಿಸಲ್ಪಡಬೇಕು.
ವೇಗದ ಪರಿಶೀಲನೆ ಮತ್ತು ದೊಡ್ಡ ಚಿತ್ರ ಪ್ರಮಾಣಗಳನ್ನು ಅಗತ್ಯವಿರುವ ಅಪ್ಲಿಕ್ಕೇಶನ್ಗಳು ಸಾಮಾನ್ಯವಾಗಿ ತ್ವರಿತ ಕಾರ್ಯಕ್ಷಮತೆಯನ್ನು ಬಳಸುತ್ತವೆ, ದೊಡ್ಡ ಮೆಮರಿ ಸಾಮರ್ಥ್ಯ ಮತ್ತು ಅರ್ಥವಂತ ಪ್ರದರ್ಶನಾಗುಟಕ್ಕೆ.
ಕೈಗಾರಿಕ ಪರಿಸರದಲ್ಲಿ ಕೈಗಾರಿಕಾ PCಗಳನ್ನು ಸಾಮಾನ್ಯವಾಗಿ ಬಳಸುತ್ತಾರೆ ಏಕೆಂದರೆ ಅವರು ಕಠಿಣ ಪರಿಸ್ಥಿತಿಯಲ್ಲಿ ನಂಬಿಕೆ ಸಾರಿಸುತ್ತದೆ. ಅವರು ಧೂಳ್, ಕಂಪನೆ, ತಾಪಮಾನ ಬದಲಾವಣೆ, ಆಧಾರ ಮತ್ತು ವಿದ್ಯುತ್ ವಿಘಾತವನ್ನು ಸಹಿಸುತ್ತವೆ, ಅವರಂತೆಯೇ ನಿರಂತರ ಕಾರ್ಖಾನೆಯ ಕಾರ್ಯಚರಣೆಗೂ ಅನುಕೂಲಕರವಾಗುತ್ತವೆ.
ದೃಷ್ಟಿ ಪ್ರಕ್ರಿಯೆಗೂಳ್ಳ ಸಾಫ್ಟ್ವೇರ್
ದೃಷ್ಟಿ ಪ್ರಕ್ರಿಯೆಗೂಳ್ಳ ಸಾಫ್ಟ್ವೇರ್ ಕಚ್ಚಾ ಚಿತ್ರ ಡೇಟಾವನ್ನು ಅರ್ಥಪೂರ್ಣ ಪರಿಶೀಲನೆ ಫಲಿತಾಂಶಗಳಲ್ಲಿ ರೂಪಾಂತರಿಸುವ ಘಟಕವಾಗಿದೆ.
ಚಿತ್ರವನ್ನು ಸ್ವೀಕರಿಸಿದ ನಂತರ, ಸಾಫ್ಟ್ವೇರ್ ಅದನ್ನು ವಿಶೇಷ ಕಲಣೋಳಗಳ ಮೂಲಕ ವಿಶ್ಲೇಷಿಸುತ್ತದೆ. ವಿಶ್ಲೇಷಣೆ ಸಾಮಾನ್ಯವಾಗಿ ಶ್ರೇಣೆಯ ಕಾರ್ಯಗಳನ್ನು ಅನುಸರಿಸುತ್ತದೆ. ಮೊದಲು, ಸಾಫ್ಟ್ವೇರ್ ಚಿತ್ರವನ್ನು ಹೆಚ್ಚಿಸುತ್ತದೆ ಮತ್ತು ಅಗತ್ಯವಿಲ್ಲದ ಶಬ್ದವನ್ನು ತೆಗೆದುಕೊಂಡುತ್ತದೆ. ನಂತರ, ಕಂಭಗಳು, ಆಕೃತಿಗಳು, ಮಾದರಿಗಳು, ಅಕ್ಷರಗಳು ಅಥವಾ ಬಣ್ಣದ ಪ್ರದೇಶಗಳಂತಹ ಮುಖ್ಯ ವೈಶಿಷ್ಟ್ಯಗಳನ್ನು ಗುರುತಿಸುತ್ತದೆ. ನಂತರ, ಇದು ಮುನ್ನೋಟ ನಿಯಮಗಳ ಪ್ರತಿ ಕಕ್ಷೆಗಳ ವೈಶಿಷ್ಟ್ಯಗಳನ್ನು ಗಣಿಸಲು ಪರಿಮಾಣಗಳ ಪ್ರಮಾಣ, ಹೋಲಿಸುವ ಅಥವಾ ವರ್ಗೀಕರಣ ಕಾರ್ಯಗಳನ್ನು ಕಾರ್ಯಗತಗೊಳಿಸುತ್ತದೆ.
ಸಾಫ್ಟ್ವೇರ್ ಹಲವಾರು ಕಾರ್ಯಗಳನ್ನು ಕಾರ್ಯಗತಗೊಳಿಸಬಲ್ಲದು, ಅಗಭರೋ તરીકે ಪರೀಯಮಾನುಮಾನ, ವಸ್ತು ಸ್ಥಾನ, ಬಾರ್ಕೋಡ್ ಓದುವಿಕೆ, ದೃಷ್ಟಿಯ ಅಕ್ಷರ ಗುರುತಿಸಲು (OCR), ದೋಷ ಪತ್ತೆ, ಮಾದರಿಯ ಹೋಲಿಸುವಿಕೆ, ಮತ್ತು ಉತ್ಪನ್ನ ಗುರುತಿಸುವಿಕೆ.
ವಿಶ್ಲೇಷಣೆ ಸಂಪೂರ್ಣವಾದ ನಂತರ, ಸಾಫ್ಟ್ವೇರ್ ಪರಿಶೀಲನೆ ಫಲಿತಾಂಶಗಳನ್ನು ಉತ್ಪತ್ತಿಸುತ್ತದೆ. ಈ ಫಲಿತಾಂಶಗಳಲ್ಲಿ ಪಾಸ್/ಫೇಲ್ ನಿರ್ಧಾರಗಳು, ಆಯಮ ಮೌಲ್ಯಗಳು, ವಸ್ತು ಸಂಕೇತಗಳು, ಗುರುತಿಸಲು ಕೋಡ್ಗಳು, ದೋಷ ಸ್ಥಳಗಳು, ಅಥವಾ ಯಂತ್ರ ನಿಯಂತ್ರಣ ಆಜ್ಞೆಗಳು ಸೇರಿರಬಹುದು.
ಕೆಲವು ಸಾಫ್ಟ್ವೇರ್ ವೇದಿಕೆಗಳು ತುಂಬಾ ವಿಶೇಷವಾದ ಪರಿಶೀಲನೆ ಕಾರ್ಯಗಳಿಗಾಗಿ ರೂಪ ಕಾರಣ ಮತ್ತು ಇತರರು ಬೇರೆ ಬೇರೆ ಉತ್ಪಾದನೆಯ ಮತ್ತು ಗುಣ ನಿಯಂತ್ರಣ ಅಪ್ಲಿಕ್ಕೇಶನ್ಗಳಿಗೆ ಹೊಂದಿಕೆ ಮಾಡಲು ಹೊಂದಾಣಿಕೆ ಮಾಡಬಹುದಾದ ಮೋಾರದ ಸಾಧನಗಳನ್ನು ಒದಗಿಸುತ್ತವೆ.
ನಿಯಂತ್ರಣ ಘಟಕವು I/O, ಚಲನೆಯ ನಿಯಂತ್ರಣ, ಮತ್ತು ಮಟ್ಟ ಪರಿವರ್ತನೆಗಳನ್ನು ಒಳಪಡಿಸುತ್ತದೆ.
ನಿಯಂತ್ರಣ ಘಟಕವು ಯಂತ್ರದ ದೃಷ್ಟಿ ವ್ಯವಸ್ಥೆಯನ್ನು ਬਾਹਰੀ ಸಾಧನಗಳಿಗೆ ಸಂಪರ್ಕಿಸುತ್ತದೆ ಮತ್ತು ಪರಿಶೀಲನೆ ಫಲಿತಾಂಶಗಳನ್ನು ಶಾರೀರಿಕ ಕ್ರಿಯೆಗೆ ಪರಿವರ್ತಿಸಲು ಅನುಮತಿಸುತ್ತದೆ.
ಚಿತ್ರ ವಿಶ್ಲೇಷಣೆ ಸಂಪೂರ್ಣವಾದ ನಂತರ, ಸಾಫ್ಟ್ವೇರ್ ಪರಿಶೀಲನೆ ಮಾಹಿತಿ ನಿಯಂತ್ರಣ ಘಟಕಕ್ಕೆ ಕಳುಹಿಸುತ್ತದೆ. ನಂತರ ನಿಯಂತ್ರಣ ಘಟಕ PLCಗಳು, ರೋಬೋಟ್ಗಳು, ಸಂಕೋಚನ, ಆಕ್ಟ್ಯುಯೇಟರ್ಗಳು, ಚಲನವಲನ ನಿಯಂತ್ರಕಗಳು ಮತ್ತು I/O ಮೋಡ್ಯೂಲ್ಗಳಿಗೆ ಸಂಪರ್ಕಿಸುತ್ತದೆ.
ಸರಳ ಪರಿಶೀಲನೆ ವ್ಯವಸ್ಥೆಗಳಲ್ಲಿ ನಿಯಂತ್ರಣ ಘಟಕವು ಕೇವಲ ಮೂಲ ಪಾಸ್ ಅಥವಾ ಫೇಲ್ ಸಂಕೇತವನ್ನು ಕಳುಹಿಸಬಹುದು. ಉದಾಹರಣೆಗೆ, ದೋಷಿತ ಉತ್ಪನ್ನವನ್ನು ಪತ್ತೆ ಮಾಡಿದಾಗ, output signal ಅನ್ನು ಬಳಸುವುದರಿಂದ ಉತ್ಪಾದನಾ ಮಾರ್ಗದಿಂದ ವಸ್ತುವನ್ನು ತೆಗೆದುಹಾಕಲು ನಿರವೇಶನ ಅಂಗಸಾಧನವನ್ನು ಸಕ್ರಿಯಗೊಳಿಸಬಹುದು.
ಹೆಚ್ಚು ಸುಧಾರಿತ ವ್ಯವಸ್ಥೆಗಳಿಗಾಗಿ ಹೆಚ್ಚಿನ ನಿಯಂತ್ರಣ ಸಾಮರ್ಥ್ಯಗಳ ಅಗತ್ಯವಿದೆ. ರೋಬೊಟಿಕ್ ಅಪ್ಲಿಕೆಶನ್ಗಳಲ್ಲಿ, ದೃಷ್ಟಿ ವ್ಯವಸ್ಥೆ ವಸ್ತುವಿನ ನಿಖರವಾದ ಸ್ಥಾನ ಮತ್ತು ಗುಣವನ್ನು ಲೆಕ್ಕಹಾಕಬಹುದು ಮತ್ತು ಈ ಸಂಕೇತವನ್ನು ರೋಬೋಟ್ ನಿಯಂತ್ರಕಕ್ಕೆ ಕಳುಹಿಸುತ್ತವೆ. ನಂತರ ರೋಬೋಟ್ ತನ್ನ ಚಲನೆಯ ಪಥವನ್ನು ಸೆಬಲ್ಲದು ಮತ್ತು ನಿಖರವಾಗಿದಂತೆ ತೆಗೆದುಕೊಂಡು-ಹಂದಿಸುತ್ತವೆ, ಅಸೆಂಬ್ಲಿ, ಅಥವಾ ವ್ಯವಸ್ಥೆ ಕಾರ್ಯಗಳನ್ನು ನಿರ್ವಹಿಸಬಲ್ಲದು.
ನಿಯಂತ್ರಣ ಘಟಕವು ಸಂಕೇತ ಮಟ್ಟ ರೂಪಾಂತರವನ್ನು ನಿರ್ವಹಿಸಬಲ್ಲದು, ದೃಷ್ಟಿ ವ್ಯವಸ್ಥೆದಿಂದ ಸಂಪರ್ಕಿತ ಉಪಕರಣಗಳೊಡನೆ ಸಂವಹನ ಸಂಕೇತಗಳು ಹೊಂದಾಣಿಕೆಯಲ್ಲಿ ಇರುತ್ತವೆ ಎಂಬುದನ್ನು ಖಚಿತಪಡಿಸುತ್ತದೆ. ಡೇಟಾ ವಿನಿಮಯ ಮತ್ತು ಯಂತ್ರ ಕ್ರಿಯೆಗಳನ್ನು ಹೊಂದಿಸುವ ಮೂಲಕ, ನಿಯಂತ್ರಣ ಘಟಕವು ಉತ್ಪನ್ನ ತಿರಸ್ಕಾರ, ರೋಬೋಟ್ ಮಾರ್ಗದರ್ಶನ, ಸ್ಥಾನ ಸಂಕೋಚನ, ಪ್ರಕ್ರಿಯೆ ಸಮನ್ವಯ ಮತ್ತು ಉತ್ಪಾದನಾ-ರ ಓಟವನ್ನು ಸ್ವಾಯತ್ತ ಪ್ರತಿಕ್ರಿಯೆಗಳನ್ನು ಸಾಧ್ಯಗೊಳಿಸುತ್ತದೆ.
ಯಂತ್ರ ದೃಷ್ಟಿಯ ವೈಶಿಷ್ಟ್ಯಗಳು
ಕೈಯಿನಲ್ಲಿ ಪರಿಶೀಲನೆಗೆ ಹೋಲಿಸಿದಾಗ ಯಂತ್ರ ದೃಷ್ಟಿಯು ಹಲವಾರು ಪ್ರಯೋಜನಗಳನ್ನು ಒದಗಿಸುತ್ತದೆ, ವಿಶೇಷವಾಗಿ ಉತ್ಪನ್ನಗಳನ್ನು ತಕ್ಷಣ, ದೋಷರಹಿತ ಮತ್ತು ಸತತವಾಗಿ ಪರಿಶೀಲಿಸಬೇಕಾದ ಉತ್ಪಾದನಾ ಪರಿಸರದಲ್ಲಿ. ಕೈಯಲ್ಲಿ ಪರಿಶೀಲನೆಯಾಗುವಾಗ, ಕಾರ್ಯಕರ್ತರು ನಿರಂತರವಾಗಿ ಭಾಗಗಳನ್ನು ವೀಕ್ಷಿಸಲು, ಅವುಗಳನ್ನು ಗುಣ ಚಿತ್ರದ ವಿರುದ್ಧ ಹೋಲಿಸಲು ಮತ್ತು ಅವರು ನೋಡಿದ ಮೇಲೆ ನಿರ್ಧಾರಗಳನ್ನು ಕೈಗೊಳ್ಳಬೇಕು. ಉತ್ಪಾದನಾ ಪ್ರಮಾಣಗಳು ಹೆಚ್ಚಾಗುವಂತೆ, ಸಹಜ ಗಮನ ಮತ್ತು ಸ್ಥಿತಿಸ್ಥಾಪಕತೆಯನ್ನು ಕಾಪಾಡುವುದು ಕಷ್ಟವಾಗುತ್ತದೆ.
ಯಂತ್ರ ದೃಷ್ಟಿ ಈ ಸವಾಲುಗಳನ್ನು ಡಿಜಿಟಲ್ ಇಮೇಜಿಂಗ್, ಸ್ವಾಯತ್ತ ವಿಶ್ಲೇಷಣೆ ಮತ್ತು ಪೂರ್ವನಿಯೋಜಿತ ಪರಿಶೀಲನಾ ನಿಯಮಗಳನ್ನು ಬಳಸಿಕೊಂಡು ಪರಿಹರಿಸುತ್ತದೆ. ವ್ಯವಸ್ಥೆ ಕಾನ್ಫಿಗರ್ ಆದ ಮೇಲೆ, ಪ್ರತಿಯೊಬ್ಬ ಉತ್ಪನ್ನವೂ ಒಂದೇ ಪರಿಶೀಲನಾ ಪ್ರಕ್ರಿಯೆಯ ಮೂಲಕ ಸಾಗುತ್ತದೆ ಮತ್ತು ಒಂದೇ ಮಾನದಂಡಗಳನ್ನು ಬಳಸಿಕೊಂಡು ಮೌಲ್ಯಮಾಪನ ಮಾಡಲಾಗುತ್ತದೆ. ಇದು ಹೆಚ್ಚಿನ ಖಚಿತತೆ, ಉತ್ತಮ ಸ್ಥಿತಿಸ್ಥಾಪಕತೆ, ઝડપી ಪರಿಶೀಲನೆ ವೇಗಗಳು, ಇನ್ನಷ್ಟು ನಿರಾಕೃತ ಫಲಿತಾಂಶಗಳು ಮತ್ತು ಕಡಿಮೆ ದಾಕಲಾತಿ ವೆಚ್ಚಗಳಿಗೆ ಕಾರಣವಾಗುತ್ತದೆ.
ಶ್ರದ್ಧೆ
ಯಂತ್ರ ದೃಷ್ಟಿಯ ಅತ್ಯಂತ ಮುಖ್ಯವಾದ ಶಕ್ತಿಗಳಲ್ಲಿ ಒಂದು ಉತ್ತಮ ಶ್ರದ್ಧತೆ ಹಂಚುವುದು ಮತ್ತು ಪರಿಶೀಲನೆಗಳನ್ನು ನಿರ್ವಹಿಸಲು ಸಾಧ್ಯತೆ.
ಹಲವಾರು ಕೈಗಾರಿಕಾ ಉತ್ಪಾದನೆಗಳು ಬಹಳ చిన్న ಮತ್ತು ನಕ್ಕದ್ದ ಇದು ಅತಿ ಕಷ್ಟವಾಗಿದೆ ಎಂದು ತಮ್ಮ ಹರಕೆಯ ಆಟ ಸೇರುತ್ತದೆ. ಉದಾಹರಣೆಗಳು ಸೂಕ್ಷ್ಮ ವಿದ್ಯುತ್ ಸರ್ಕ್ಯೂಟ್ಗಳು, ಮೈಕ್ರೋ-ಕಾಂಪೊನೆಂಟ್ಗಳು, ಚಿಕ್ಕ ರಂಧ್ರಗಳು, ಇನ್ಸ್ಟ್ರುಮೆಂಟ್ಗಳು, ಮುದ್ರಿತ ಗುರುತುಗಳನ್ನು, ಸೋಲ್ಡರ್ ಜಂಟಿಗಳನ್ನು, ಮತ್ತು ಸ್ತ್ರೀ ವಿಮರ್ಶೆಗಳನ್ನು ಒಳಗೊಂಡವನೇ. ಉದಾಹರಣೆಗೆ ಛಾಯಾಚಿತ್ರಗಳನ್ನು ಬಳಸುವುದು, ಕೈಯಿಂದ ಪರಿಶೀಲನೆ ಸಾಮಾನ್ಯವಾಗಿ ವ್ಯಕ್ತಿಯ ದೃಷ್ಟಿಕೋನದ ಆಧಾರವಾಗಿ ಅಳೆಯುವುದು, ಇದು ಗಣನೆಗೆ ಒಳಗಾಗುವುದು ಹಾಗೂ ಪ್ರಮಾಣವನ್ನು ಭಿನ್ನವಾಗಿಸುತ್ತದೆ.
ಯಂತ್ರ ದೃಷ್ಟಿಯ ವ್ಯವಸ್ಥೆಗಳು ಪಿಕ್ಸೆಲ್ ಮಟ್ಟದಲ್ಲಿ ಇಮೇಜ್ಗಳನ್ನು ವಿಶ್ಲೇಷಿಸುತ್ತವೆ. ಛಾಯಾಚಿತ್ರವನ್ನು ಹಿಡಿದ ನಂತರ, ಸಾಫ್ಟ್ವೇರ್ ನಿರ್ದಿಷ್ಟ ಕೆಳಮಟ್ಟಗಳನ್ನು, ಕಡೇರಿಗಳನ್ನು, ಮಾದರಿಗಳನ್ನು ಅಥವಾ ಮಾರ್ಗಸೂಚಿಗಳನ್ನು ಗುರುತಿಸುತ್ತದೆ ಮತ್ತು ಸೂಕ್ತ ಗಣನೆಗಳನ್ನು ಆಧಾರದ ಮೇಲೆ ಗಣನೆ ಮಾಡುತ್ತದೆ. ಇದು ವ್ಯವಸ್ಥೆಗೂ ಭಿನ್ನತೆ, ವ್ಯಾಸ, ಸಂಕೋಚನ, ಸ್ಥಳ ಮತ್ತು ಮೇಲ್ಮಟ್ಟದ ವಿವರಗಳನ್ನು ಮಾಪನ ಮಾಡಲು ತನ್ನ ಶ್ರದ್ಧೆಯನ್ನು ಕೊಡುತ್ತದೆ.
ವಿದ್ಯುತ್ಪಾದನೆ, ಅಂಕುಡಂಕು ಉತ್ಪಾದನೆ, ವೈದ್ಯಕೀಯ ಸಾಧನಗಳ ಅಸೆಂಬ್ಲಿ ಮತ್ತು ಶ್ರದ್ಧೆ ಯಂತ್ರಾಚಾರಗೊಳಿಸುವಿಕೆಗಳು, ಯಂತ್ರ ದೃಷ್ಟಿಯ ಯಶಸ್ವಿ ಮಸುಕನ್ನು ಮತ್ತು ಆಯಾಮದ ವ್ಯತ್ಯಾಸಗಳನ್ನು ಗುರುತಿಸಲು ಸಾಧ್ಯವಾಗುತ್ತದೆ, ಮಾಣು ಸಂಖ್ಯೆಯ ಪರಿಶೀಲನೆಯಾಗಿರುವಾಗ ತಂತ್ರಾಂಶವೇಂದರೆ ದೃಷ್ಟಿಯಿಂದ ಹೆಚ್ಚು ಶ್ರದ್ಧೆ ಬಂದಿದಾಗ. ಈ ಡಿಪಿಟಿವ್ಗಳ ಶ್ರದ್ಧೆ ಉತ್ತಮವಾಗಿ ಉತ್ಪನ್ನ ಗುಣವನ್ನು ಸುಧಾರಿಸುತ್ತದೆ ಮತ್ತು ದೋಷಿತ ಉತ್ಪನ್ನಗಳ ಮುಂದಿನ ಉತ್ಪಾದನಾ ಹಂತಗಳಲ್ಲಿ ತಲುಪುವ ಸಾಧ್ಯತೆಯನ್ನು ಕಡಿಮೆ ಮಾಡುತ್ತದೆ.
ಪುನರಾವೃತ್ತ
ಯಂತ್ರ ದೃಷ್ಟಿಯು ಪ್ರತಿಯೊಮ್ಮೆ ಒಂದೇ ಪರಿಶೀಲನಾ ವಿಧಾನವನ್ನು ಅನುಸರಿಸುತ್ತಿರುವುದರಿಂದ ಹೆಚ್ಚು ಸ್ಥಿರ ಪರಿಶೀಲನಾ ಫಲಿತಾಂಶಗಳನ್ನು ಒದಗಿಸುತ್ತದೆ.
ಕೈಯಲ್ಲಿ ಪರಿಶೀಲನೆಯಾಗುವಾಗ, ವಿಭಿನ್ನ ಕಾರ್ಯಕರ್ತರು ಒಂದೇ ಉತ್ಪನ್ನವನ್ನು ವಿಭಿನ್ನವಾಗಿ ಮೌಲ್ಯೋಚನೆ ಮಾಡಬಹುದು. ಒಂದೇ ಕಾರ್ಯಕರ್ತ ಕೂಡ ವಿಭಿನ್ನ ಸಮಯದಲ್ಲಿ ಸಾಂದರ್ಭಿಕ ಶ್ರದ್ಧೆ, ಕೆಲಸದ ಒತ್ತಣೆ ಅಥವಾ ನೋಡುವ ಪರಿಸ್ಥಿತಿಯ ಕಾರಣದಿಂದ ವಿಭಿನ್ನ ನಿರ್ಣಯಗಳಿಗೆ ಬರಬಹುದು. ಈ ವ್ಯತ್ಯಾಸಗಳು ಒಟ್ಟು ಗುಣಮಟ್ಟವನ್ನು ಕಿತ್ತು ಹಾಕಬಹುದು.
ಯಂತ್ರ ದೃಷ್ಟಿಯು ಇವುಗಳಲ್ಲಿ ಬಹಳಷ್ಟು ಬದ್ಧತೆಗಳನ್ನು ನಿವಾರಿಸುತ್ತದೆ, ಏಕೆಂದರೆ ಇದು ಪ್ರತಿಯೊಬ್ಬ ಉತ್ಪನ್ನವನ್ನೂ ಪೂರ್ವನಿಯೋಜಿತ ಪರಿಶೀಲನಾ ನಿಯಮಗಳನ್ನು ಮತ್ತು ಮಾಪನ ಪರಿಮಾಣಗಳನ್ನು ಅನ್ವಯಿಸುತ್ತದೆ. ಪ್ರತಿಯೊಬ್ಬ ಚಿತ್ರವು ಒಂದು ನಿರ್ದಿಷ್ಟ ಕ್ರಿಯೆಯ ಕ್ರಮವನ್ನು ಬಳಸಿಕೊಂಡು ಪ್ರಕ್ರಿಯೆ ಮಾಡಲಾಗುತ್ತದೆ, ಮತ್ತು ಪ್ರತಿಯೊಬ್ಬ ಫಲಿತಾಂಶವು ಒಂದೇ ಅಳವಡಿಕೆ ನಿಯಮಗಳ ವಿರುದ್ಧ ಹೋಲಿತವಾಗುತ್ತದೆ.
ಉದಾಹರಣೆಗೆ, ಉತ್ಪನ್ನವು ವಿಶೇಷ ತಾಳೆ ಶ್ರೇಣಿಯಲ್ಲಿ ಒಂದು ರಂಧ್ರದ ವ್ಯಾಸವನ್ನು ಅಗತ್ಯವಿದ್ದರೆ, ವ್ಯವಸ್ಥೆ ಪ್ರತಿಯೊಬ್ಬ ಪರಿಶೀಲನಾ ಚಕ್ರಕ್ಕಾಗಿ ಒಂದೇ ವಿಧಾನವನ್ನು ಬಳಸುವುದು. ಮೊದಲ ಉತ್ಪನ್ನ ಅಥವಾ ಹಜಾರಾದ ದಶಶ ಅಮಾಂಕಗಳಾಗಿದ್ದರೂ ಆ ಮೌಲ್ಯಮಾಪನ ಪ್ರಕ್ರಿಯೆ ಬದಲಾಗುವುದಿಲ್ಲ.
ಈ ಉನ್ನತ ಪುನರಾವೃತ್ತಾತ್ಮಕತೆ ತಯಾರಕರಿಗೆ ಒಂದೇ ಉತ್ಪನ್ನ ಗುಣವನ್ನು ಕಾಪಾಡಲು, ಸ್ಥಿರ ಉತ್ಪಾದನಾ ಮಾನದಂಡಗಳನ್ನು ಕಾಪಾಡಲು ಮತ್ತು ದೊಡ್ಡ ಉತ್ಪಾದನಾ ಪ್ರಮಾಣಗಳಲ್ಲಿ ನಿರಂತರ ಪರಿಶೀಲನೆಯ ಕಾರ್ಯಕ್ಷಮತೆಯನ್ನು ಕಾಪಾಡಲು ಸಹಾಯಿಸುತ್ತದೆ.
ವೇಗ
ಯಂತ್ರ ದೃಷ್ಟಿಯ ವ್ಯವಸ್ಥೆಗಳು ಕೈಯಲ್ಲಿ ಪರಿಶೀಲನೆಯ ವಿಧಾನಕ್ಕಿಂತ ಹೆಚ್ಚು ವೇಗದಲ್ಲಿ ಉತ್ಪನ್ನಗಳನ್ನು ಪರೀಕ್ಷಿಸುತ್ತವೆ.
ಉತ್ಪಾದನಾ ಪರಿಸರದಲ್ಲಿ, ಉತ್ಪನ್ನಗಳು ನಿರಂತರವಾಗಿ ಕ Conveyor, ಅಂಕಗಣಿತ ಟೇಬಲ್ಗಳು ಅಥವಾ ಸ್ವಾಯತ್ತ ಅಸೆಂಬ್ಲಿ ವ್ಯವಸ್ಥೆಗಳಲ್ಲಿ ಚಲಿಸುತ್ತವೆ. ಉತ್ಪಾದನಾ ಬಾಟಲಿಂಗ್ ಅನ್ನು ಹಾಗೂ ಉಲಕರವನ್ನು ಮುರಿಯದೇ, ಪರಿಶೀಲನೆ ಬಹಳ ಉದ್ದೇಶವಾಗಿ ಪೂರ್ಣಗೊಳ್ಳಲು ಇದೆ. ಕೈಯಲ್ಲಿ ಪರಿಶೀಲನೆ ತೂಗುಗೆ ನೆನೆಸಲು ಸಾಧ್ಯವಾಗದಾಗ, ಹೊರಡು ಹಿಡಿಯುತ್ತವೆ, ವಿಶೇಷವಾಗಿ ದೊಡ್ಡ ಸಂಖ್ಯೆಯ ಉತ್ಪನ್ನವನ್ನು ಪರಿಶೀಲಿಸಲು ಮಾತ್ರ ಅವಕಾಶ ದಿಕ್ಕು ಸಿಗುವುದಿಲ್ಲ.
ಯಂತ್ರ ದೃಷ್ಟಿಯ ವ್ಯವಸ್ಥೆಗಳು ಈ ಶ್ರೇಣಿಗಳನ್ನು ಕೖಕುಂಟಲ ಆಚರಿಸುತ್ತವೆ. ಒಬ್ಬ ವಸ್ತು ಪರಿಶೀಲನೆಯ ಸ್ಥಾನವನ್ನು ತಲುಪಿದಾಗ, ಒಂದು ಸೆನ್ಸಾರ್ನವು ಕ್ಯಾಮೆರಾವನ್ನು ಸಕ್ರಿಯಗೊಳಿಸುತ್ತದೆ, ಚಿತ್ರವನ್ನು ಹಿಡಿದಿಡುತ್ತದೆ, ಮತ್ತು ಸಂಪೂರ್ಣವಾಗಿ ವಿಶ್ಲೇಷಿಸಲು ಸಾಫ್ಟ್ವೇರ್ ತಕ್ಷಣವೇ ವಿಶ್ಲೇಷಣೆ ಪ್ರಾರಂಭಿಸುತ್ತದೆ. ಮಾಪನಗಳು, ದೋಷಗಳ ಪರಿಶೀಲನೆಗಳು, ಮಾದರಿಗಳನ್ನು ಹೋಲಿಸುತ್ತವೆ ಮತ್ತು ನಿರ್ಧಾರ ಸೇವೆಯನ್ನು ಹಾರುತ್ತವೆ.
ಚಿತ್ರ ಹಿಡಿಯುವುದು ಮತ್ತು ವಿಶ್ಲೇಷಣೆ ಕ್ಷಿಪ್ರವಾಗಿರುವ ಕಾರಣ, ಯಂತ್ರ ದೃಷ್ಟಿಯು ನಿಖರ ವಿಶ್ವಾದಿಕಾರವನ್ನು ಕಾಪಾಡಿಕೊಂಡು ವಾಸ್ತವ ಸಮಯದಲ್ಲಿ ವೇಗವಾಗಿ ತರುವ ಉತ್ಪನ್ನವನ್ನು ಪರೀಕ್ಷಿಸಲು ಸಾಧ್ಯವಾಗುತ್ತದೆ. ಇದು ತಯಾರಕರಿಗೆ ಗುಣಮಟ್ಟದ ನಿಯಂತ್ರಣವನ್ನು ತ್ಯಜಿಸದೆ, ಹೆಚ್ಚು ಉತ್ಪಾದನಾ ಪ್ರಮಾಣವನ್ನು ದಳವನ್ನು ಕಾಯ್ದಿರಿಸಲು ಸಹಾಯಿಸುತ್ತದೆ.

ವ್ಯಕ್ತಿತ್ವ
ಯಂತ್ರ ದೃಷ್ಟಿ ವ್ಯಕ್ತಿಗತ ವಿವರಣೆ ಪರಿಯಾಯವನ್ನು छोड़ಿರುವ ವಿವಿಧ-ಮಟ್ಟದ ಇಮೇಜ್ ಡೇಟಾದ ಆಧಾರದಲ್ಲಿ ತಪಾಸಣೆ ಫಲಿತಾಂಶಗಳನ್ನು ಒದಗಿಸುತ್ತದೆ.
ಕೈಯಿಂದ ತಪಾಸಣೆಯ ಸಂದರ್ಭದಲ್ಲಿ, ವಿಭಿನ್ನ ವ್ಯಕ್ತಿಗಳು ಒಂದೇ ದೋಷವನ್ನು ವಿಭಿನ್ನವಾಗಿ ಅಂಕಗೊಳಿಸಬಹುದು. ಅನುಭವ ಮಟ್ಟ, ದೃಶ್ಯ ಪರಿಜ್ಞಾನ, ಕೆಲಸದ ಒತ್ತಡ, ಬೆಳಕಿನ ಪರಿಸ್ಥಿತಿಗಳು ಮತ್ತು ಕಳಕಳಿಯಂತಹ ತತ್ವಗಳು ತೀರ್ಮಾನಗಳನ್ನು ಪ್ರಭಾವಿತ ಮಾಡಬಹುದು. ಹೀಗಾಗಿ, ಹದಗಿನ ದೋಷಗಳನ್ನು ಕೆಲವೊಮ್ಮೆ ಒಬ್ಬ ತಪಾಸಕ ಸ್ವೀಕರಿಸುತ್ತಾನೆ ಮತ್ತು ಇನ್ನೊಬ್ಬನು ತಿರಸ್ಕಾರಿಸುತ್ತಾನೆ.
ಯಂತ್ರ ದೃಷ್ಟಿ ಕಾರ್ಯಕ್ರಮಬದ್ಧ ತಪಾಸಣಾ ನಿರ್ಧಾರಗಳನ್ನು ಅನುಸರಿಸುತ್ತದೆ. ವ್ಯವಸ್ಥೆ ಚಿತ್ರ ವೈಶಿಷ್ಟ್ಯಗಳನ್ನು ವಿಶ್ಲೇಷಿಸುತ್ತದೆ, ಅಳತೆಯೊಂದಿಗೆ ತೂಕದ ನಿರ್ಧಿಷ್ಟ ಮಿತಿಗಳನ್ನು ಹೋಲಿಸುತ್ತವೆ ಮತ್ತು ಸ್ಥಾಪಿತ ನಿಯಮಗಳಾದಂತೆ ಫಲಿತಾಂಶಗಳನ್ನು ಉತ್ಪತ್ತಿ ಮಾಡುತ್ತದೆ. ಪ್ರತಿಯೊಂದು ತೀರ್ಮಾನವು ಹಿಡಿಯುವ ಚಿತ್ರದ ಡೇಟಾಗೆ, ಸಂಖ್ಯಾತ್ಮಕ ಅಳತೆಗಳಿಗೆ ಮತ್ತು ಕಾರ್ಯಕ್ರಮಬದ್ಧ ಮಿತಿಗಳಿಗೆ ಆಧಾರಿತವಾಗಿದೆ.
ಅಂದಾಜು ಪ್ರಕ್ರಿಯೆ ವ್ಯಕ್ತಿಯ পাৰে ನಿರ್ಧಾರವನ್ನು ಅವಲಂಬಿಸುತ್ತಿಲ್ಲದ ಕಾರಣ, ತಪಾಸಣೆ ಫಲಿತಾಂಶಗಳು ವಿಭಿನ್ನ ಶ್ರೇಣಿಗಳ, ಉತ್ಪಾದನ ಬೆಳೆ, ಮತ್ತು ಕಾರ್ಯಾಚರಣೆ ಪರಿಸ್ಥಿತಿಗಳ ನಡುವೆ ಹೆಚ್ಚು ಸಮಾನಜಾತವಾಗಿರುತ್ತದೆ. ಈ ವಸ್ತುವಾದಿತ್ವವು ಗುಣವಾದ ಖಾತರಿಯ, ಪ್ರಕ್ರಿಯೆ ನಿಯಂತ್ರಣ ಮತ್ತು ಉತ್ಪನ್ನ ಲಕ್ಷಣವನ್ನು ಸುಧಾರಿಸುತ್ತದೆ.
ವೆಚ್ಚ ಕಾರ್ಯಕ್ಷಮತೆ
ಯಂತ್ರ ದೃಷ್ಟಿ ಸಂಪೂರ್ಣ ಉತ್ಪಾದನಾ ಕಾರ್ಯಕ್ಷಮತೆಯನ್ನು ಸುಧಾರಿಸುತ್ತು while ಸಮರ್ಪಕ ಮತೀಯ ವೆಚ್ಚವನ್ನು ದೀರ್ಘಾವಧಿಯಲ್ಲಿಯೇ ಅಪಾರ್ಗಟ್ಟುಕೂಡ kannada.
ಕೈಯಿಂದ ತಪಾಸಣಾ ಪ್ರಕ್ರಿಯೆಯಲ್ಲಿ, ಬಹಳಷ್ಟು ಕಾರ್ಯ ನಿರ್ವಹಕರನ್ನು ಉತ್ತರಾರ್ಧದಲ್ಲಿ ಉತ್ಪನ್ನಗಳನ್ನು ನಿರಂತರವಾಗಿ ತಪಾಸಿಸಲು ಅಗತ್ಯವಿರಬಹುದು. ಪ್ರಮಾಳಿತ ಉತ್ಪನ್ನಗಳನ್ನು ಪುನಃ ಪರೀಕ್ಷಿಸಲು ಅಥವಾ ಪುನರಾವೃತ್ತ ಅಳತೆಗಳನ್ನು ಮಾಡಲು ಹೆಚ್ಚಿನ ಕಾರ್ಮಿಕ ಸಹಾಯವು ಬೇಕಾಗಿರಬಹುದು. ಉತ್ಪಾದನಾ ಪ್ರಮಾಣವು ಹೆಚ್ಚು ಆಗುವುದರಿಂದ ಕಾರ್ಮಿಕ ವೆಚ್ಚಗಳು ಮತ್ತು ತಪಾಸಣಾ ಶ್ರೇಣಿಗಳು ಏಕಕಾಲದಲ್ಲಿ ಹೆಚ್ಚಾಗುತ್ತವೆ.
ಸ್ವಾಯತ್ತ ಯಂತ್ರ ದೃಷ್ಟಿ ವ್ಯವಸ್ಥೆ ಈ ಕಾರ್ಯಗಳನ್ನು ಸ್ಥಗಿತಗೊಳ್ಳದಂತೆ ನಿರಂತರವಾಗಿ ನಿರ್ವಹಿಸಬಹುದು. ಸ್ಥಾಪಿಸಿದ ಮತ್ತು ಕಾನ್ಫಿಗರ್ ಮಾಡಲಾದ ನಂತರ, ವ್ಯವಸ್ಥೆ ಒಂದು ನಿರ್ದಿಷ್ಟ ತಪಾಸಣಾ ಪ್ರಮಾಣಗಳನ್ನು ನಿರ್ವಹಿಸುತ್ತಿರುವ ಸಂದರ್ಭಗಳಲ್ಲಿ ಹೆಚ್ಚಿನ ಸಂಖ್ಯೆಯ ಉತ್ಪನ್ನಗಳನ್ನು ತಪಾಸಿಸುತ್ತದೆ. ಇದು ಪುನರಾವೃತ್ತ ಕೈಯಿಂದ ತಪಾಸಣೆಗಾಗಿ ಅಗತ್ಯವಿರುವಂತಹುದನ್ನು ಕಡಿಮೆ ಮಾಡುತ್ತದೆ ಮತ್ತು ವ್ಯಕ್ತಿಗಳನ್ನು ತಾಂತ್ರಿಕ ಪರಿಣತಿ ಅಥವಾ ಪ್ರಕ್ರಿಯೆಯ ಸುಧಾರಣೆಗೆ ಅಗತ್ಯವಿರುವ ಕೆಲಸಗಳಲ್ಲಿ ನಿರ್ದಿಷ್ಟಗೊಳಿಸಲು ಪರಿಷ್ಕರಿಸುತ್ತದೆ.
ಕ್ಯಾಮೆರಾಗಳು, ಬೆಳಕು, ಸೋಫ್ಟ್ವೇರ್ ಮತ್ತು ಪ್ರಕ್ರಿಯೆ ಸಾಧನಗಳಿಗೆ ಮೊದಲಿನ ಹೂಡಿಕೆ ವೆಚ್ಚಗಳು ಸಂಬಂಧಿತವಾಗಿ ಉಚ್ಛ ದರದಾಗಿದ್ದರೂ, ದೀರ್ಘಾವಧಿಯ ಲಾಭಗಳು ಸಾಮಾನ್ಯವಾಗಿ ಮೊದಲು ವೆಚ್ಚವನ್ನು ಮೀರಿಸುತ್ತವೆ. ಈ ಲಾಭಗಳಲ್ಲಿ ಉನ್ನತ ಉತ್ಪಾದಕತೆ, ಕಡಿಮೆ ಕಾರ್ಮಿಕ ವೆಚ್ಚ, ಕಡಿಮೆ ತಪಾಸಣಾ ದೋಷಗಳು, ಅಪರೂಪದ ಉತ್ಪನ್ನಗಳ ಸಂಖ್ಯೆಯ ಕಡಿಮೆ, ಕಡಿಮೆ ಸಾಮಗ್ರಿ ವ್ಯರ್ಥ ಮತ್ತು ಸುಧಾರಿತ ನಿರ್ಮಾಣ ಕಾರ್ಯಕ್ಷಮತೆಯನ್ನು ಒಳಗೊಂಡಿವೆ.
ಹೀಗಾಗಿ, ಯಂತ್ರ ದೃಷ್ಟಿಯನ್ನು ಗುಣನಿಯಂತ್ರಣದ ಉಪಕರಣವಾಗಿರುವಷ್ಟೂ ಕಡಿಮೆ ವೆಚ್ಚ ಕಡಿಮೆ ಮಾಡುವ, ಪ್ರಕ್ರಿಯೆ ಸಂಸ್ಕರಣೆ ಮತ್ತು ದೀರ್ಘಾವಧಿಯ ಕಾರ್ಯಾಚರಣಾ ಕಾರ್ಯಕ್ಷಮತೆಯನ್ನು ಬೆಂಬಲಿಸುವ ತಂತ್ರಜ್ಞಾನವಾಗಿ ಸಾಧ್ಯವಾಗುತ್ತಿದೆ.
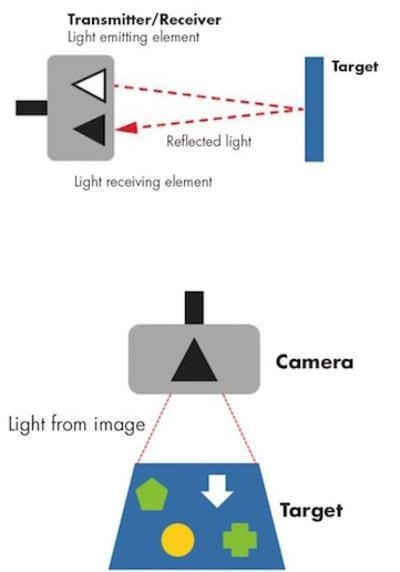
ದೃಶ್ಯ ಸೆನ್ಸರ್ಗಳ ಕಾರ್ಯನೀತಿಯು
ದೃಶ್ಯ ಸೆನ್ಸರ್ಗಳು ಮಾಹಿತಿಯನ್ನು ಹೇಗೆ ಸಂಗ್ರಹಿಸುತ್ತವೆ ಮತ್ತು ವಿಶ್ಲೇಷಿಸುತ್ತವೆ
ದೃಶ್ಯ ಸೆನ್ಸರ್ ಒಂದು ಸಾಧನವಾಗಿದೆ, ಇದು ವಸ್ತುವಿನ ಚಿತ್ರಗಳನ್ನು ಹಿಡಿದುಕೊಳ್ಳುತ್ತದೆ ಮತ್ತು ಆ ಚಿತ್ರಗಳನ್ನು ಉಪಯುಕ್ತ ತಪಾಸಣೆ ಡೇಟಾಗಳಲ್ಲಿ ಪರಿವರ್ತಿಸುತ್ತದೆ. ಇದು ಯಂತ್ರ ದೃಷ್ಟಿ ಪ್ರಕ್ರಿಯೆಯ ಮೊದಲ ಹಂತವಾಗಿದೆ ಏಕೆಂದರೆ ಎಲ್ಲಾ ಅಳತೆಗಳು ಮತ್ತು ತಪಾಸಣೆ ಫಲಿತಾಂಶಗಳು ಸೇರುವ ಚಿತ್ರದ ಗುಣಮಟ್ಟಕ್ಕೆ ಅವಲಂಬಿತವಾಗಿರುತ್ತವೆ.
ಕೈಯ್ಗತ ಕಾರ್ಯಗಳಲ್ಲಿ, ದೃಶ್ಯ ಸೆನ್ಸರ್ಗಳನ್ನು ವಸ್ತುವಿನ ಗಾತ್ರ, ಸ್ಥಾನ, ಆಕಾರ, ಚಲನಶೀಲತೆ, ವಿಸ್ತೀರ್ಣ, ಚರ್ಯೆ ಸ್ಥಳ ಮತ್ತು ಕೆಂಪೆರಂಗಾಧಾರಣೆಯ ಬಗ್ಗೆ ಮಾಹಿತಿ ಪಡೆಯಲು ಬಳಸಲಾಗುತ್ತದೆ. ಈ ಮಾಹಿತಿ ಉತ್ಪನ್ನವು ಗುಣಮಟ್ಟದ ಅಗತ್ಯಗಳನ್ನು ಪೂರೈಸುತ್ತದೆಯೇ, ಅದು ಮುಂದಿನ ಪ್ರಕ್ರಿಯೆಗೆ ಸರಿಯಾಗಿ ಸ್ಥಿತಿಯಲ್ಲಿದ್ದೆಕ್ಕೆ, ಅಥವಾ ಅದನ್ನು ಸ್ವೀಕರಿಸಬೇಕೇ ಅಥವಾ ತಿರಸ್ಕರಿಸಬೇಕೆಂದು ನಿರ್ಧರಿಸಲು ಸಹಾಯ ಮಾಡುತ್ತದೆ.
ಪ್ರಕ್ರಿಯೆ ಅದೇನೆಂದು ಪ್ರಾರಂಭವಾಗುತ್ತದೆ, ಯಂತ್ರ ಸೆನ್ಸರ್ಗಳ ದೃಶ್ಯದ ಕ್ಷೇತ್ರಕ್ಕೆ ಪ್ರವೇಶಿಸಿದಾಗ. ಸಮರ್ಪಿತ ಬೆಳಕು ಮೂಲ ಅಥವಾ ಹಿಂಬಾಲಿಸುವ ಪರಿಸರದಿಂದ来的 ಬೆಳಕು ವಸ್ತುವಿನ ಮೇಲ್ಮಟ್ಟದಿಂದ ಹುಟ್ಟುತ್ತದೆ ಮತ್ತು ಸೆನ್ಸರ್ಗಳ ಆಪ್ತಿಕ ವ್ಯವಸ್ಥೆ ಮೂಲಕ ದಟ್ಟವಾಗಿ ಸಾಗುತ್ತದೆ. ಆಪ್ತಿಕ ಭಾಗಗಳು ಈ ಸಂಕೋಚಿತ ಬೆಳಕನ್ನು ಚಿತ್ರ ಸೆನ್ಸರ್ ಮೇಲೆ ತಿರಸ್ಕಾರ ಮಾಡುತ್ತವೆ, ವಸ್ತುವಿನ ಡಿಜಿಟಲ್ ಪ್ರತಿನಿಧಿಯನ್ನು ರೂಪಿಸುತ್ತವೆ.
ಚಿತ್ರ ರೂಪಾಂತರ ಮತ್ತು ಪಿಕ್ಸೆಲ್ ಆಧಾರಿತ ಪತ್ತೆ
ದೃಶ್ಯ ಸೆನ್ಸರ್ಗಳ ಕೇಂದ್ರದಲ್ಲಿ ಸಾವಿರಾರು ಅಥವಾ ಲಕ್ಷಾಂತರ ಮಾದರಿ ಪಿಕ್ಸೆಲ್ಗಳನ್ನು ಒಳಗೊಂಡ ಚಿತ್ರ ಸೆನ್ಸರ್ ಇದೆ. ಪ್ರತಿ ಪಿಕ್ಸೆಲ್ ವಸ್ತುವಿನ ಬಹಳ ಸಣ್ಣ ಪ್ರದೇಶವನ್ನು ಬೆಳಕನ್ನು ಸಂಗ್ರಹಿಸುತ್ತದೆ ಮತ್ತು ಬೆಳಕು ತೀವ್ರತೆ ಮತ್ತು, ಕೆಲ ಸಂದರ್ಭಗಳಲ್ಲಿ, ಬಣ್ಣದ ವಿಷಯಗಳಲ್ಲಿ ಮಾಹಿತಿ ದಾಖಲಿಸುತ್ತದೆ.
ಚಿತ್ರವನ್ನು ಹಿಡಿದಾಗ, ಪ್ರತಿ ಪಿಕ್ಸೆಲ್ ಅದು ಸ್ವೀಕರಿಸುತ್ತಿರುವ ಬೆಳಕಿನ ಪ್ರಮಾಣಕ್ಕೆ ತಕ್ಕಂತೆ ಸಂಖ್ಯಾತ್ಮಕ ಮೌಲ್ಯವನ್ನು ಶೇಖರಿಸುತ್ತದೆ. ಪ್ರಜ್ವಲಿತ ಪ್ರದೇಶಗಳು ಹೆಚ್ಚಿನ ಪಿಕ್ಸೆಲ್ ಮೌಲ್ಯಗಳನ್ನು ಉತ್ಪತ್ತಿಸುತ್ತವೆ, whereas ಕತ್ತಲು ಪ್ರದೇಶಗಳು ಕಡಿಮೆ ಮೌಲ್ಯಗಳನ್ನು ನೀಡುತ್ತವೆ. ಇವು ಸೇರಿಕೊಂಡು, ಈ ಪಿಕ್ಸೆಲ್ ಮೌಲ್ಯಗಳು ವಸ್ತುವಿನ ಸಂಪೂರ್ಣ ಡಿಜಿಟಲ್ ಚಿತ್ರವನ್ನು ರೂಪಿಸುತ್ತವೆ.
ಚಿತ್ರದಲ್ಲಿ ಗೋಚರವಾಗುವ ಮಾಹಿತಿಯ ಪ್ರಮಾಣವು ಸೆನ್ಸರ್ಗಳ ನಿರಾಕರಣೆ ಮೇಲೆ ಬಹಳ ಅವಲಂಬಿತವಾಗಿರುತ್ತದೆ, ಇದು ಲಭ್ಯವಿರುವ ಪಿಕ್ಸೆಲ್ಗಳ ಸಂಖ್ಯೆಯ ಮೂಲಕ ನಿರ್ಧಾರಿಯಾಗುತ್ತದೆ. ಹೆಚ್ಚಿನ ನಿರಾಕರಣೆಯ ಸೆನ್ಸರ್ ಚಿತ್ರವನ್ನು ಹೆಚ್ಚು ಮಾದರಿ ಬಿಂದುಗಳಿಗೆ ವಿಭಜಿಸುತ್ತದೆ, ಸಣ್ಣ ವೈಶಿಷ್ಟ್ಯಗಳನ್ನು ಹಿಡಿದಿಡಲು ಮತ್ತು ಹೆಚ್ಚು ನಿಖರವಾಗಿ ಅಳತೆ ಮಾಡಲು ಅವಕಾಶ ನೀಡುತ್ತದೆ.
ಉದಾಹರಣೆಗೆ, ವೃತ್ತಿಕ ಪರಿಕರ ಮಂಡಲವನ್ನು ತಪಾಸಣೆ ಮಾಡುವಾಗ, ಕಡಿಮೆ ನಿರಾಕರಣೆಯ ಚಿತ್ರವು ಖಾತರಿಯ ಭಾಗಗಳ ಸಾರಾಂಶವನ್ನು ಮಾತ್ರ ತೋರಿಸುತ್ತಿದೆ. ಉನ್ನತ ನಿರಾಕರಣೆಯ ಚಿತ್ರವು ಹೆಚ್ಚು ನಿಖರವಾದ ವಿವರಗಳನ್ನು ಹೊರತೆಗೆದುಕೊಳ್ಳುತ್ತವೆ, ಉದಾಹರಣೆಗೆ ಚಿಕ್ಕ ಚಾಲಕವು, ಚಿಕ್ಕ ತಾಂತ್ರಿಕ ಜೋಡಣೆಗಳನ್ನು, ತಾತ್ಕ್ಷಣಹೊರೆಯುವ ಗುರುತನ್ನು ಅಥವಾ ಸೂಕ್ಷ್ಮ ಸರ್ಫೇಸ್ දೋಷಗಳನ್ನು. ಈ ಹೆಚ್ಚಾದ ವಿವರವು ಅಳತೆಗೊಳಿಸುವ ನಿಖರವಾದದ್ದು ಮತ್ತು ದೋಷ ಪತ್ತೆ ಸಾಮರ್ಥ್ಯವನ್ನು ಉತ್ತಮಗೊಳಿಸುತ್ತದೆ.
ಚಿತ್ರ ಪ್ರಕ್ರಿಯೆ ಮತ್ತು ವೈಶಿಷ್ಟ್ಯಗಳನ್ನು ವಾಪಸಿಲು
ಚಿತ್ರವನ್ನು ಬಂಧಿಸಿದ ನಂತರ, ದೃಶ್ಯ ಸೆನ್ಸರ್ ಚಿತ್ರ ಡೇಟಾವನ್ನು ಸಂಸ್ಕರಣೆಯನ್ನು ಪ್ರಾರಂಭಿಸುತ್ತದೆ. ಮೊದಲ ಹಂತವು ಹೆಚ್ಚು ಪ್ರಮಾಣಚಿತ್ರ ಗುಣಮಟ್ಟವನ್ನು ಸುಧಾರಿಸುವುದನ್ನು ಒಳಗೊಂಡಿರುತ್ತದೆ ಶಬ್ದವನ್ನು ಕಡಿಮೆ ಮಾಡುವುದು, ಕಾಂಟ್ರಾಸ್ಟ್ ಅನ್ನು ವೃದ್ಧಿಸುವುದು ಮತ್ತು ವಸ್ತುವನ್ನು ಹಿನ್ನೆಲೆಯಿಂದ ಬೇರ್ಪಡಿಸುವುದನ್ನು ಒಳಗೊಂಡಿರುತ್ತದೆ. ಈ ಕಾರ್ಯಗಳು ಮುಖ್ಯ ವೈಶಿಷ್ಟ್ಯಗಳನ್ನು ಹೆಚ್ಚಿನ ಸ್ಪಷ್ಟತೆಯೊಂದಿಗೆ ಗುರುತಿಸಲು ಸಹಾಯ ಮಾಡುತ್ತದೆ.
ಸೆನ್ಸರ್ ನಂತರ ನಿರ್ದಿಷ್ಟ ಚಿತ್ರ ಲಕ್ಷಣಗಳನ್ನು ವಿಶ್ಲೇಷಿಸುತ್ತದೆ. ಇದು ಎಡ್ಜ್ಗಳನ್ನು ಪತ್ತೆಹಚ್ಚಬಹುದು, ಆಕೃತಿಜಾತ ಶ್ರೆಣಿಗಳನ್ನು ಗುರುತಿಸಬಲ್ಲದು, ಅಳತೆಗಳನ್ನು ಲೆಕ್ಕಹಾಕಬಹುದು, ವಸ್ತುವಿನ ಪೈಪೋಟಿ ನಿರ್ಧಾರವನ್ನು ಬಗೆಹರಿಯಬಹುದು, ಅಂತರಗಳನ್ನು ಅಳೆಯಬಹುದು, ಅಥವಾ ಗುರಿಯ ಕೇಂದ್ರ ಬಿಂದುವನ್ನು ಪತ್ತೆಹಚ್ಚಬಹುದು. ಈ ಹಂತದಲ್ಲಿ, ವ್ಯವಸ್ಥೆ ಕಚ್ಚಾ ಪಿಕ್ಸೆಲ್ ಮಾಹಿತಿಯನ್ನು ಗುರುತಿಸುವ ಮಾಹಿತಿಯ ಡೇಟಾವಾಗಿ ಪರಿವರ್ತಿಸುತ್ತದೆ.
ಹೊರಹಾಕಿದ ಮಾಹಿತಿಯನ್ನು ಸಂಗ್ರಹಿತ ಉಲ್ಲೇಖಚಿತ್ರಗಳು, предварителе ಅStandards, ಪೂರಕ ಮಿತಿ ಅಥವಾ ತಪಾಸಣೆ ಮಾನದಂಡಗಳೊಂದಿಗೆ ಹೋಲಿಸಲಾಗುತ್ತದೆ. ಹೋಲಿಸುವ ಪ್ರಕ್ರಿಯೆ ವಸ್ತುವು ನಿರೀಕ್ಷಿತ ಅಗತ್ಯಗಳಿಗೆ ಹೊಂದಿಕೊಂಡಿರುವುದೇ ಎಂಬುದನ್ನು ನಿರ್ಧರಿಸುತ್ತದೆ.
ಉದಾಹರಣೆಗೆ, система ಲೇಬಲ್ ಸಮರ الحديثة ಇದೆಯಾ ಎಂದು ಪರಿಶೀಲನೆಯಲ್ಲಿ, ಕ೦ಪೋನೆಂಟ್ ಸಮಾನವಾಗಿ ಇಟ್ಟುಕೊಂಡಿದ್ದಾನೆ,ೊಂದಿಗೆ ಒಂದೆಡೆ ಬ Aperture ದೈಮಿಟರ್ ಸಹ ಪರಿಶೀಲಿಸಲು ಸಹಾಯ ಮಾಡುತ್ತದೆ ಎಂದು ಗುರುತಿಸುತ್ತಿದೆ. ಈ ಲೆಕ್ಕಾಚಾರವು ಪ್ರತಿಯೊಂದು ತಪಾಸಣಾ ಚಕ್ರಕ್ಕೆ ಒಂದೇ ಪ್ರೋಗ್ರಾಮ್ ನಿಯಮಗಳನ್ನು ಪ徹ಿಸುವ ಮೂಲಕ ಮುನ್ಸೂಚನೆ ಮಾಡುತ್ತದೆ.
ಹೊರವನ್ನು ಫಲಿತಾಂಶಗಳು ಮತ್ತು ನಿರ್ಧಾರ ತೆಗೆದುಕೊಳ್ಳುವುದು
ವಿಶ್ಲೇಷಣೆ ಸಂಪೂರ್ಣವಾದ ನಂತರ, ದೃಶ್ಯ ಸೆನ್ಸರ್ ತಪಾಸಣಾ ಫಲಿತಾಂಶಗಳನ್ನು ಸೃಷ್ಟಿಸುತ್ತದೆ, ಓಪರೇಟರ್ಗಳು, ಯಂತ್ರಗಳು, ಅಥವಾ ಕಂಟ್ರೋಲ್ ವ್ಯವಸ್ಥೆಗಳಿಂದ ಬಳಸಬಹುದು.
ಅನ್ವಯನದ ಆಧಾರದ ಮೇಲೆ, ಔಟ್ಪುಟ್ ವಸ್ತುವಿನ ಪತ್ತೆ ನಿರ್ಧಾರಗಳು, ಸ್ಥಾನ ಸಹಿಕಗಳು, ಅಳತೆಯ ಅಳೆಯಿಕೆಗಳು, ಪೈಪೋಟಿ ಮಾಹಿತಿಗಳು, ದೋಷ ಸ್ಥಳಗಳು, ಗುರುತಿಸುವ ಡೇಟಾ, ಅಥವಾ ಪಾಸ್/ಫೇಲ್ ನಿರ್ಧಾರಗಳನ್ನು ಒಳಗೊಂಡಿರಬಹುದು. ಈ ಫಲಿತಾಂಶಗಳನ್ನು ಮನಿರಕ್ಷಣಾ ವ್ಯವಸ್ಥೆಯಲ್ಲಿ ಪ್ರದರ್ಶಿಸಬಹುದು, ಗುಣಮಟ್ಟ ದಾಖಲೆಗಳನ್ನು ಸಂಗ್ರಹಿಸಲು ಅಥವಾ ಉತ್ಪಾದನಾ ಉಪಕರಣಗಳಿಗೆ ನೇರವಾಗಿ ಪ್ರಸಾರಗೊಳಿಸಬಹುದು.
ಸ್ವಯಂಚಾಲಿತ ತಯಾರಿಕಾ ವ್ಯವಸ್ಥೆಗಳಲ್ಲಿ, ಔಟ್ಪುಟ್ ಅನ್ನು ತಕ್ಷಣ ಬಳಸುತ್ತದೆ. ಉದಾಹರಣೆಗೆ, ಒಂದು ರೋಬೊಟ್ ಆಯ್ಕೆ ಮಾಡುವುದು ಮತ್ತು ಇರಿಸುವ ಕಾರ್ಯಕ್ಕಾಗಿ ಸ್ಥಾನ ಸಹಿಕಗಳನ್ನು ತೆಗೆದುಕೊಳ್ಳಬಹುದು, ಕಾನ್ವೇಯರ್ ವ್ಯವಸ್ಥೆ ದೋಷಿತ ಉತ್ಪನ್ನವನ್ನು ನಿರೂಪಿಸಬಲ್ಲದು, ಅಥವಾ ಉತ್ಪಾದನಾ ಯಂತ್ರವು ಅಳೆಯಿಕೆಯ ಫಲಿತಾಂಶಗಳ ಆಧಾರದ ಮೇಲೆ ತನ್ನ ಕಾರ್ಯಶೀಲ ಪ್ರ parámetrosಗಳನ್ನು ಹೊಂದಿಸುತ್ತಿದೆ.
ದೃಶ್ಯ ಸೆನ್ಸರ್ನ ಮುಖ್ಯ ಭಾಗಗಳು
ದೃಶ್ಯ ಸೆನ್ಸರ್ ಕಱಿಮೆಗಾರಿಕೆಯಂತೆ ಕೆಲಸ ಸಾಮರ್ಥ್ಯವನ್ನು ಪಡೆದಿರುವ ಹಲವು ತಂತ್ರಜ್ಞಾನಗಳನ್ನು ಸಂಯೋಜಿಸುತ್ತದೆ, ಚಿತ್ರ ಡೇಟಾವನ್ನು ಬಂಧಿಸಲು, ಸಂಸ್ಕರಿಸಲು, ಮತ್ತು ಪ್ರಸಾರಗೊಳಿಸಲು. ಈ ಕಾರ್ಯಗಳನ್ನು ಸೂಕ್ತವಾಗಿ ಮತ್ತು ವಿಶ್ವಾಸಾರ್ಹವಾಗಿ ನಿರ್ವಹಿಸಲು, ಹಲವಾರು ಭಾಗಗಳು ತಪಾಸಣೆ ಪ್ರಕ್ರಿಯೆभरಿ ಒಟ್ಟಾಗಿ ಕೆಲಸ ಮಾಡುತ್ತವೆ.
ಐಪ್ಟಿಕಲ್ ಅಂಗಗಳು
ಐಪ್ಟಿಕಲ್ ಅಂಗಗಳು ವಸ್ತುವಿನಿಂದ ಬೆಳಕನ್ನು ಚಿತ್ರ ಸೆನ್ಸರ್ ಪರಿಶೀಲಿಸುವುದು ಮತ್ತು ತೊಡೆದು ಹಾಕುವುದು. ಈ ಅಂಗಗಳು ಲೆನ್ಸ್ಗಳನ್ನು, ಫಿಲ್ಟ್ಗಳನ್ನು, ವಿಷ್ಣುಗಳು, ಮತ್ತು ರಕ್ಷಣಾತ್ಮಕ ಐಪ್ಟಿಕಲ್ ಅಂಗಗಳನ್ನು ಒಳಗೊಂಡಿರಬಹುದು. ಅವರ ಉದ್ದೇಶ ಮುಖ್ಯ ದೃಶ್ಯ ವಿವರಗಳನ್ನು ಉಳಿಸುವ ತೀಕ್ಷ್ಣ ಮತ್ತು ಸ್ಥಿರ ಚಿತ್ರವನ್ನು ಸೃಷ್ಟಿಸುವುದು.
ಲೇಸರ್ ಘಟಕಗಳು
ಹೆಚ್ಚು ದೃಶ್ಯ ಸೆನ್ಸರ್ ಲೇಸರ್ ನಿಕಾಸಕಗಳನ್ನು ಬಳಸುತ್ತವೆ, ನಿಖರವಾದ ಬೆಳಕಿನ ಡೊಣೆಗಳು ಅಥವಾ ಉಲ್ಲೇಖ ಪಂಕ್ತಿಗಳನ್ನು ತಯಾರಿಸಲು. ಈ ಲೇಸರ್ ಯೋಜನೆಗಳು ಅಂತರವನ್ನು ಅಳೆಯುವುದು, ವಸ್ತು ಪ್ರೊಫೈಲ್ಗಳನ್ನು ಪತ್ತೆಹಚ್ಚುವುದು ಮತ್ತು ಮೂರು ಆಯಾಮದ ಮೇಲ್ಮಟ್ಟದ ಮಾಹಿತಿಯನ್ನು ಸೃಷ್ಟಿಸಲು ಸುಲಭವಾಗಿಸುತ್ತದೆ.
ಸ್ಕ್ಯಾನಿಂಗ್ ಮೋಟಾರ್ಸ್ ಮತ್ತು ಸ್ಕ್ಯಾನಿಂಗ್ ಮೆಕಾನಿಜಮ್
ಪ್ರದೇಶ ಸ್ಕ್ಯಾನಿಂಗ್ ಅಥವಾ ಪ್ರೊಫೈಲ್ ಅಳೆಯಿಕೆಯ ಅಗತ್ಯವಿರುವ ಅನ್ವಯಗಳಲ್ಲಿ, ಸ್ಕ್ಯಾನಿಂಗ್ ಮೋಟಾರ್ಸ್ ಮತ್ತು ಸ್ಕ್ಯಾನಿಂಗ್ ಮೆಕಾನಿಜಮ್ ಐಪ್ಟಿಕಲ್ ಅಂಗಗಳನ್ನು ಜಾಗ್ರತವಾಗಿಸುತ್ತವೆ ಅಥವಾ ಗುರಿ ಒಳಗಿನ ಸ್ಕ್ಯಾನಿಂಗ್ ಮಾರ್ಗವನ್ನು ನೇರಿಸುತ್ತದೆ. ಈ ನಿಯಂತ್ರಿತ ಚಲನೆ ಸೆನ್ಸರ್ ಗೆ ವಿಭಿನ್ನ ಸ್ಥಾನಗಳಿಂದ ಚಿತ್ರ ಡೇಟಾವನ್ನು ಸಂಗ್ರಹಿಸಲು ಮತ್ತು ವಸ್ತುವಿನ ಸಂಪೂರ್ಣ ನಿರೂಪಣೆಯನ್ನು ನಿರ್ಮಿಸಲು ಅವಕಾಶ ನೀಡುತ್ತದೆ.
ಕಾಂಗ್ಯುಲರ್ ಸೆನ್ಸರ್ಗಳು
ಕಾಂಗ್ಯುಲರ್ ಸೆನ್ಸರ್ಗಳು ಸ್ಕ್ಯಾನಿಂಗ್ ವ್ಯವಸ್ಥೆಯ ಒಳಗಿನ ತಿರುಗುವುದನ್ನು ಮತ್ತು ಚಲನೆಗಳನ್ನು ನಿಯಮಿಸುತ್ತವೆ. ತಪಾಸಣೆ ಪ್ರಕ್ರಿಯೆ ಸಾಲುವವರೆಗೆ ಮುನ್ಸೂಚನೆಯು ಸಮಾನ ಅಂಗಗಳನ್ನು ನಿರ್ಧಾರ ಕೈಗೊಳ್ಳುವಂತೆ ಸಹಾಯ ಮಾಡುತ್ತದೆ.
ಲೀನೀಯರ್CCD ಸೆನ್ಸರ್ಗಳು
ಬಹಳಷ್ಟು ದೃಶ್ಯ ಸೆನ್ಸಿಂಗ್ ವ್ಯವಸ್ಥೆಗಳು ಲೀನೀಯರ್ CCD (ಚಾರ್ಜ್-ಕಪ್ಲ್ಡ್ ಸಾಧನವಿರೋಧ) ಸೆನ್ಸರ್ಗಳನ್ನು ಬಳಸುತ್ತವೆ, ಒಂದೇ ಸಾಲಿನಲ್ಲಿ ಚಿತ್ರ ಮಾಹಿತಿಯನ್ನು ಬಂಧಿಸಲು. ವಸ್ತು ಅಥವಾ ಸ್ಕ್ಯಾನಿಂಗ್ ವ್ಯವಸ್ಥೆಯ ಚಲನೆ ಆಗಾಗ್ಗೆ, ಹುದ್ದೆಯ ಚಿತ್ರ ಸಾಲುಗಳನ್ನು ಹಂಚಿಕೊಳ್ಳಲಾಗುತ್ತದೆ ಮತ್ತು ಸಂಪೂರ್ಣ ಚಿತ್ರವನ್ನು ಸೃಷ್ಟಿಸಲು ಒಟ್ಟುಗೂಡಿಸಲಾಗುತ್ತದೆ. ಈ ಪರಿಕಲ್ಪನೆಯನ್ನು ಮಿಕ್ಕ ತಪಾಸಣೆ ಹಾಗು ಮೇಲ್ಮಟ್ಟದ ಸ್ಕ್ಯಾನಿಂಗ್ ಅನ್ವಯಗಳಲ್ಲಿ ಸಾಮಾನ್ಯವಾಗಿ ಬಳಸಲಾಗುತ್ತದೆ.
ಸೆನ್ಸರ್ ಡ್ರೈವರ್ಗಳು ಮತ್ತು ಎಲೆಕ್ಟ್ರಾನಿಕ್ ನಿಯಂತ್ರಣ ವೃತ್ತಗಳು
ಸೆನ್ಸರ್ ಡ್ರೈವರ್ಗಳು ಮತ್ತು ನಿಯಂತ್ರಣ ವಿದ್ಯುತ್ ಉಲ್ಲೇಖ ಚಿತ್ರ ಸೆನ್ಸರ್ಗಳನ್ನು, ಲೇಸರ್ಗಳನ್ನು, ಸ್ಕ್ಯಾನಿಂಗ್ ಸಾಧನೆಗಳನ್ನು ಮತ್ತು ಸಂವಹನ ಇಂಟರ್ಫೇಸ್ಗಳನ್ನು ನಿರ್ವಹಿಸುತ್ತವೆ. ಅವರು ಸಂಕೇತ್ತಾಸು ಸಮಯವನ್ನು ನಿರ್ವಹಿಸುತ್ತಾರೆ, ಡೇಟಾ ಸಾಮಾನ್ಯಕ್ಕಾಗಿ ಒಟ್ಟಾಗಿ ನಿರೋಧಿಸುತ್ತಾರೆ, ಮತ್ತು ನಿರಂತರ ಕಾರ್ಯಾಚರಣೆಯ ಸಮಯದಲ್ಲಿ ಸ್ಥಿರತೆಯು ಖಾತ್ರಿಯಾಗಿ ಇರುತ್ತದೆ.
ಯಂತ್ರ ದೃಶ್ಯದಲ್ಲಿ ದೃಶ್ಯ ಸೆನ್ಸರ್ಗಳ ಮುಖ್ಯತೆ
ದೃಶ್ಯ ಸೆನ್ಸಾರ್ಗಳು ಯಂತ್ರ ದೃಶ್ಯ ವ್ಯವಸ್ಥೆಯ ಮೂಲಭೂತ ಭಾಗವಾಗಿವೆ, ಏಕೆಂದರೆ ಅವು Subsequent Analysis ಮತ್ತು ನಿರ್ಧಾರ ತೆಗೆದುಕೊಳ್ಳುವ ಪ್ರಕ್ರಿಯೆಗಳಿಗೆ ಅಗತ್ಯವಿರುವ ಚಿತ್ರ ಡೇಟಾವನ್ನು ಒದಗಿಸುತ್ತವೆ. ನಿಖರವಾದ ಚಿತ್ರ ಹಿಡಿಯದಿದ್ದರೆ, ವಿಶ್ವಾಸಾರ್ಹ ಅಳೆಯಿಕೆ ಮತ್ತು ತಪಾಸಣೆ ಸಾಧ್ಯವಿಲ್ಲ.
ಪರ್ಯಾಯ ತಲೆಹೊರೆಯ ದಾರಿಗಳನ್ನು, ವಿದ್ಯುನ್ಮಾನ ಉಳುಕು, ಚಿತ್ರವಾಗಿ ಕಣ್ಮರೆಯಾಗುವ ಸಾಧನಗಳನ್ನು, ಸ್ಕ್ಯಾನಿಂಗ್ ವ್ಯವಸ್ಥೆಗಳನ್ನೂ, ಮತ್ತು ಪ್ರಕ್ರಿಯೆಯ ಕಾರ್ಯಗಳನ್ನು ವ್ಯಾಖ್ಯಾನಿಸಿ, ದೃಷ್ಠಿ ಸಂವೇದಕಗಳು ಏಕಕಾಲದಲ್ಲಿ ಮತ್ತು ನಿರಂತರವಾಗಿ ವಸ್ತುಗಳ ಬಗ್ಗೆ ವಿವರವಾದ ಮಾಹಿತಿಯನ್ನು ಸೆರೆಹಿಡಿಯಬಹುದು. ಈ ಸಾಮರ್ಥ್ಯವು ಗುಣಮಟ್ಟದ ಪರಿಶೀಲನೆ, ಯಾಂತ್ರಿಕ ಮಾರ್ಗದರ್ಶನ, ಪರಿಮಾಣ ಮಾಪನ, ವಸ್ತು ಗುರುತಿಸುವಿಕೆ, ಸ್ವಾಯತ್ತ ಅಸೆಂಬ್ಲಿ, ಮತ್ತು ಕೈಗಾರಿಕಾ ಪ್ರಕ್ರಿಯೆ ನಿಯಂತ್ರಣದಂತಹ ಅನ್ವಯಗಳಲ್ಲಿ ಅವಶ್ಯಕವಾಗಿಸುತ್ತದೆ.
ದೃಷ್ಟಿ ಸಂವೇದಕರ ಅನುಷ್ಠಾನ
ದೃಷ್ಟಿ ಸಂವೇದಕಗಳು ದೃಶ್ಯ ಮುದ್ರಣ ಪರಿಕರಗಳು, ಪರ್ಯಾಯ ಘಟಕಗಳು, ವಿದ್ಯುಾತ್ ಉಳುಕುಗಳು, ಮತ್ತು ಚಿತ್ರ - ಪ್ರೊಸessing ತಂತ್ರಜ್ಞಾನವನ್ನು ಒಂದೇ ವ್ಯವಸ್ಥೆಯಲ್ಲಿ ಒಟ್ಟುಗೂಡಿಸುತ್ತವೆ. ಸಂಪರ್ಕ ಆಧಾರಿತ ಮಾಪನ ಸಾಧನಗಳಿಗಿಂತ, ದೃಷ್ಟಿ ಸಂವೇದಕಗಳು ತಪಾಸಿಸುವ ವಸ್ತುವನ್ನು ತಲುಪಿ ಬೆ್ಲ್ಯಾಟು ಮಾಡಬೇಕಾಗಿಲ್ಲ. ಮಾಹಿತಿ ಸ್ಕ್ಯಾನರ್ನ ಮೇಲೆ ಪ್ರತಿಬಿಂಬಿತವಾಗಿರುವ ಬೆಳಕು ಸೆರೆಹಿಡಿದು, ಸಾಕ್ಷಾತ್ಕಾರವಾಗಿ ಆಳಶೋಧನೆ ಮಾಡಲಾಗುತ್ತದೆ.
ಈ ಸಂಪರ್ಕವಿಲ್ಲದ ವಿಧಾನವು ಸ್ವಾಯತ್ತ ಉತ್ಪಾದನಾ ಪರಿಸರದಲ್ಲಿ ವಿಶೇಷವಾಗಿ ಮೌಲ್ಯವಾಗಿದೆ. ಉತ್ಪನ್ನಗಳು ಕಾನ್ವಾಯರ್ನಲ್ಲಿ ಹಾರುತ್ತ, ಫಿಕ್ಚರ್ನಲ್ಲಿ ತಿರುಗುತ್ತ, ಅಥವಾ ಯಂತ್ರದಲ್ಲಿ ಸಮ್ಮೇಳನದ ಸಂದರ್ಭದಲ್ಲಿ ಮುಂದುವರೆಯುತ್ತವೆ. ಶರೀರದ ಸಂಪರ್ಕವಿಲ್ಲದೆ ಇರುವುದರಿಂದ, ಸೂಕ್ಷ್ಮ ಮೆಟ್ಟಿಲುಗಳನ್ನು, ನ 부 мяг معالجة ತಿಂಚುವಿಕೆಗಳನ್ನು, ಅಥವಾ ಉತ್ಪಾದನಾ ಪ್ರಕ್ರಿಯೆ ಹಾನಿಯಾಗುವ ಅಪಾಯವಿಲ್ಲ.
ಯಾಂತ್ರಿಕ ಅನ್ವಯಗಳಲ್ಲಿ, ದೃಷ್ಟಿ ಸಂವೇದಕಗಳು ವಸ್ತುಗಳನ್ನು ಶೋಧಿಸಲು, ಸ್ಥಾನಗಳನ್ನು ಬೆಳಗಿಸಲು, ಪರಿಮಾಣಗಳನ್ನು ಮಾಪಿಸಲು, ಲಕ್ಷಣಗಳನ್ನು ಗುರುತಿಸಲು, ಮತ್ತು ಸ್ವಯಂಚಾಲಿತ ಚಲನೆಗಳನ್ನು ಮಾರ್ಗದರ್ಶನ ಮಾಡಲು ಅಗತ್ಯವಾದ ಮಾಹಿತಿಯನ್ನು ನೀಡುತ್ತವೆ. ಈ ಕಾರ್ಯಗಳನ್ನು ಸಾಧಿಸಲು, ಯಂತ್ರ ದೃಶ್ಯ ವ್ಯವಸ್ಥೆಗಳು ಸಾಮಾನ್ಯವಾಗಿ ಮೂರು ಪ್ರಮುಖ ಮಾಪನ ವಿಧಾನಗಳಿಗೆ ಅವಲಂಬಿಸುತ್ತವೆ: ಪ್ರಕಾಶ ಚಿತ್ರ ಸಂಕಲನ, ತಿದ್ದಿದ ಚಿತ್ರ ಸಂಕಲನ, ಮತ್ತು ಅಂತರದ ಆಧಾರಿತ ಮಾಪನ.
ಪ್ರಕಾಶ ಚಿತ್ರ ಸಂಕಲನ: ವಸ್ತು ಲಕ್ಷಣ ನಿಷ್ಕರ್ಷಣೆಗೆ ಬೆಳಕು ತೀವ್ರತೆಗೆ ಬಳಸುವುದು
ಪ್ರಕಾಶ ಚಿತ್ರ ಸಂಕಲನವು ಯಂತ್ರ ದೃಶ್ಯದ ವ್ಯವಸ್ಥೆಗಳಲ್ಲಿ ಒಂದು ವ್ಯಾಪಕವಾಗಿ ಬಳಸುವ ವಿಧಾನವಾಗಿದೆ. ಈ ವಿದ್ಯುತ್ ಅದು ಒಂದು ನಿಯಂತ್ರಿತ ಬೆಳಕು ಪರಿಸರದಲ್ಲಿ ಗುರಿ ವಸ್ತುವಿನ ಚಿತ್ರವನ್ನು ಸೆರೆಹಿಡಿದಾಗ ಪ್ರಾರಂಭವಾಗುತ್ತದೆ.
ಚಿತ್ರದ ಪ್ರತಿ ಪ್ರದೇಶವು ಆ ಚಿತ್ರ ಸಂವೇದಕವನ್ನು ತಲುಪಿ ಹೋಗುವ ಬೆಳಕಿನ ಪ್ರಮಾಣವನ್ನು ಅನ್ವಯಿಸಲಾಗುವ ಪ್ರಕಾಶ ಮೌಲ್ಯವನ್ನು ಹೊಂದಿದೆ. ಸುಗಮ ಪರಿಮಾಣಗಳು, ಮುದ್ರಿತ ಗುರುತುಗಳು, ಕಡೆಯ ಗವರಣಗಳು, ಹೋಲ್ಗಳು, ಲಿಂಕಿಂಗ್ಗಳು ಮತ್ತು ಇತರ ಲಕ್ಷಣಗಳು ಸಾಮಾನ್ಯವಾಗಿ ಬೆಳಕನ್ನು ವಿಭಿನ್ನವಾಗಿ ಪ್ರತಿಬಿಂಬಿಸುವ ಮೂಲಕ ಚಿತ್ರದಲ್ಲಿ ದೊರೆಯುವ ಪ್ರಕಾಸದಲ್ಲಿ ವ್ಯತ್ಯಾಸಗಳನ್ನು ಉಂಟುಮಾಡುತ್ತವೆ.
ಚಿತ್ರ ಪಡೆದ ನಂತರ, ಕ್ಯಾಮರಾ ಆ ಆಪ್ಟಿಕಲ್ ಚಿತ್ರವನ್ನು ಡಿಜಿಟಲ್ ಪಿಕ್ಸೆಲ್ ಡೇಟಾಗೆ ಪರಿವರ್ತಿಸುತ್ತದೆ. ಪ್ರತಿ ಪಿಕ್ಸೆಲ್ ಸಂಖ್ಯಾತ್ಮಕ ಪ್ರಕಾಶ ಮೌಲ್ಯವನ್ನು ಸಂಗ್ರಹಿಸುತ್ತದೆ, ಪರಿಣಾಮವಾಗಿ, ವ್ಯವಸ್ಥೆ ಆ ಚಿತ್ರವನ್ನು ಗಣಿತವಾಗಿಯಾಗಿ ವಿಶ್ಲೇಷಿಸಲು ಸಾಧ್ಯವಾಗುತ್ತದೆ. ಚಿತ್ರದ ಪ್ರಕ್ರಿಯೆ ಸಾಫ್ಟ್ವೇರ್ ಹೆಚ್ಚಿನದನ್ನು ಈ ಮೌಲ್ಯಗಳನ್ನು ಪರಿಶೀಲಿಸಲು, ಪ್ರಮುಖ ದೃಶ್ಯಾಂಶಗಳನ್ನು ಗುರುತಿಸುತ್ತದೆ.
ವಿಶ್ಲೇಷಣೆಯ ಸಂದರ್ಭದಲ್ಲಿ, ನಿರ systémicsವು ಕಡೆಯ ಗವರುಣಗಳನ್ನು, ಹೆಣಕಣೆಗಳನ್ನು, ನೇರ ದಾಖಲಿಕೆಗಳನ್ನು, ಲಾಬಿಗಳನ್ನು, ಮಾಪನಗಳನ್ನು, ಮುದ್ರಿತ ಪದಗಳನ್ನು, ಮೇಲ್ಮಟ್ಟದ ದೋಷಗಳನ್ನು, ಮತ್ತು ವಸ್ತು ಗಡಿ ಗುರುತಿಸುತ್ತವೆ. ಉದಾಹರಣೆಗೆ, ಯಾಂತ್ರಿಕ ಘಟಕವನ್ನು ತಪಾಸಣೆ ಮಾಡುವಾಗ, ಪ್ರಕಾಶದಲ್ಲಿ ಬದಲಾವಣೆಗಳು ಒಂದು ಹೋಲ್ಗೆ, ಮಿಲಿಸುವ ಮೇಲ್ಮಟ್ಟದ ಕಡೆಯ, ಅಥವಾ ಶ್ರೇಣಿಯ ನಿಷ್ಕಟನೆ ಬಿಂಬವನ್ನು ಬಹಿರಂಗಪಡಿಸಬಹುದು.
ಏಕೆಂದರೆ ಗ್ರೇಸ್ಕೇಲ್ ಚಿತ್ರವು ಬಹಳಷ್ಟು ಡೇಟಾವನ್ನು ಒಳಗೊಂಡಿರಬಹುದು, ಪ್ರತಿ ಪ್ರಕಾಶ ಮಟ್ಟವನ್ನು ಪ್ರಕ್ರಿಯೆಗೊತ್ತಲು ಬಹಳಷ್ಟು ಗಣಕ ಸಂಪತ್ತುಗಳನ್ನು ಬೇಕಾಗಬಹುದು. ವೇಗದ ಕೈಗಾರಿಕ ಉಪಯೋಗಗಳಲ್ಲಿ, ಹೆಚ್ಚಿನದನ್ನು ಪ್ರಸಾಧನೆ ತಂತ್ರಗಳಲ್ಲಿ ಬಳಸಲಾಗುತ್ತದೆ, ಗಣಕದ ಮುಖವನ್ನು ಕಡಿಮೆಗೊಳ್ಳಲು ಮತ್ತು ಪರಿಶೀಲನೆಯ ವೇಗವನ್ನು ಸುಧಾರಿಸಲು.
ತಿದ್ದಿದ ಚಿತ್ರ ಸಂಕಲನ: ವೇಗದ ವಿಶ್ಲೇಷಣೆಗೆ ಚಿತ್ರಗಳನ್ನು ಸರಳಗೊಳಿಸುವುದು
ತಿದ್ದಿದ ಚಿತ್ರ ಸಂಕಲನವು ವಸ್ತುವನ್ನು ಅದರ ಹಿನ್ನಿನಿಂದ ಶೀಘ್ರವಾಗಿ ಮತ್ತು ಪರಿಣಾಮಕಾರಿ ವಿಧವಾಗಿ ಪ್ರತ್ಯೇಕಿಸಲು ಒದಗಿಸುವಾಗ ಹೆಚ್ಚು ಬಳಸಲಾಗುತ್ತದೆ.
ಈ ವಿಧಾನವು ಗ್ರೇಸ್ಕೇಲ್ ಚಿತ್ರವನ್ನು ತಿದ್ದಿದ ಚಿತ್ರಕ್ಕೆ ಪರಿವರ್ತಿಸಲು ಪ್ರಾರಂಭವಾಗುತ್ತದೆ, ಇಲ್ಲಿ ಪ್ರತಿಯೊಂದು ಪಿಕ್ಸೆಲ್ಗೆ ಕೇವಲ ಎರಡು ಶ್ರೇಣಿಗಳಿಗೆ ಒಬ್ಬರಲ್ಲಿಮಟೆಗಳನ್ನು ಶ್ರೇಣಿಯಾಗುತ್ತದೆ. ಪಿಕ್ಸೆಲ್ಸ್ ಆಯ್ಕೆ ಮಾಡಿತ್ತಾದರೂ ಪ್ರಕಾಶ ನಿರ್ಣಾಯಕ ಹೆಚ್ಚಳ್ಳಿಕೆಯ ಆಧಾರದ ಮೇಲೆ ಕಪ್ಪಾಗಿಯೂ ಅಥವಾ ಬಿಳಿಯಾಗಿಯೂ ವರ್ಗೀಕೃತವಾಗುತ್ತವೆ. ತೀರಕಕ್ಕಿಂತ ಹೆಚ್ಚಾದ ಪ್ರದೇಶಗಳನ್ನು ಒಂದೇ ಶ್ರೇಣಿಗೆ ನೀಡಲಾಗುತ್ತದೆ, ಪ್ರತಿಯವನು ಕೊನೆಗೆ ಹಾಕಲಾಗುತ್ತದೆ.
ಈ ಪರಿವರ್ತನೆ ಭಯಾನಕವಾಗಿ ಚಿತ್ರವನ್ನು ಸರಳಗೊಳಿಸುತ್ತದೆ. ಸೆಳೆಯುವ ತಮ್ಮ ಪ್ರಕಾಶ ಮಟ್ಟಗಳನ್ನು ವಿಶ್ಲೇಷಿಸಲು ಬದಲಾಗಿ, ವ್ಯವಸ್ಥೆ ಕೇವಲ ಎರಡು ಪ್ರದೇಶಗಳನ್ನು ವಿಭಜಿಸುವ ಅಗತ್ಯವಿದೆ. ಫಲಿತಾಂಶವಾಗಿ, ಗಣನೆಗಳು ವೇಗವಾಗುತ್ತವೆ ಮತ್ತು ವಸ್ತು ಲಕ್ಷಣಗಳನ್ನು ಗುರುತಿಸಲು ಸುಲಭವಾಗುತ್ತದೆ.
ವಸ್ತುವನ್ನು ಹಿನ್ನಿಂದ ಪ್ರತ್ಯೇಕಿಸಿದ ನಂತರ, ವ್ಯವಸ್ಥೆ ಇನ್ನಷ್ಟು ಮಾಪನಗಳನ್ನು ಕೈಗೊಳ್ಳಬಹುದು. ಅದು ವಸ್ತುವಿನ ಪ್ರದೇಶ, ಅಗಲ, ಎತ್ತರ, ವ್ಯಾಪ್ತಿಯ, ಕಿನ್ನರಿಕೆ, ಕೇಂದ್ರ ಸ್ಥಾನ, ಅಥವಾ ಜ್ಯಾಮಿತೀಯ ರೂಪವನ್ನು ಲೆಕ್ಕಹಾಕಬಹುದು. ಇದು ವಸ್ತುಗಳನ್ನು ಎಣಿಸಲು, ಹಾಜರಿಯ ಅಥವಾ ಇಲ್ಲದಂತೆ ಪರಿಶೀಲಿಸಲು ಮತ್ತು ಮೈ להשתಲೆ ಚರಿತ್ರೆಯನ್ನು ಹೋರಿಸಲು ಸಾಧ್ಯವಾಗುತ್ತದೆ.
ಉದಾಹರಣೆಗೆ, ಅಸೆಂಬ್ಲಿಯ ಸಾಲಿನಲ್ಲಿ, ತಿದ್ದಿದ ಚಿತ್ರ ಸಂಕಲನವು ಮುಂದಿನ ತಯಾರಿಯ ಹಂತಾಧೀನೋತ್ಪನ್ನ ಭಾಗವು ಸರಿಯಾದ ಸ್ಥಳದಲ್ಲಿ ಇದ್ದರೆ ಶೀಘ್ರವಾಗಿ ಪ್ರತ್ಯೇಕಿಸಲಾಗುತ್ತದೆ. ವೇಗ ಮತ್ತು ಸರಳತೆಯ ಕಾರಣದಿಂದ, ಈ ವಿಧಾನವು ಹೆಚ್ಚಿನ ಅಂಕಣ ಪರಿಶೀಲನೆ ಮತ್ತು ಸ್ವಾಯತ್ತ ವರ್ಗಾವಣೆಗೆ ವ್ಯಾಪಕವಾಗಿ ಬಳಸಲಾಗುತ್ತದೆ.
ಅಂತರದ ಆಧಾರಿತ ಮಾಪನ: ಮೂರು ಆಯಾಮಗಳಲ್ಲಿ ಸ್ಥಾನ ಮತ್ತು ರೂಪವನ್ನು ಮಾಪಿಸುತ್ತಿರುವದ್ದು
ಕೆಲವು ಅನ್ವಯಗಳು ಎರಡು ಆಯಾಮಗಳ ಚಿತ್ರಕ್ಕಿಂತ ಹೆಚ್ಚು ಅಗತ್ಯವಿದೆ. ಈ ಪರಿಸ್ಥಿತಿಗಳಲ್ಲಿ, ವ್ಯವಸ್ಥೆಯು ವಸ್ತು ಸಂವೇದಕದಿಂದ ಎಷ್ಟು ದೂರವಾಗಿದೆ ಎಂಬುದನ್ನು ನಿರ್ಧರಿಸಬೇಕು ಮತ್ತು ಅದರ ಮೂರು ಆಯಾಮದ ರೂಪವನ್ನು ಮಾಪಬೇಕು. ಅಂತರದ ಆಧಾರಿತ ಮಾಪನ ವಿಧಾನಗಳು ಈ ಉದ್ದೇಶಕ್ಕಾಗಿ ವಿನ್ಯಾಸಗಗೊಳ್ಳುತ್ತವೆ.
ಈ ಪ್ರಕ್ರಿಯೆಯಲ್ಲಿ ಸೆನ್ಸರ್ ಮತ್ತು ವಸ್ತುವಿನ ಮೇಲೆ ವಿವಿಧ ಬಿಂದುಗಳ ನಡುವಿನ ಶاريರಿಕ ಅಂತರದ ಕುರಿತು ಮಾಹಿತಿ ಒಯ್ಯುವುದು ಸೇರಿದೆ. ಈ ಮಾಹಿತಿಯನ್ನು ಬಳಸಿಕೊಂಡು, ಸಿಸ್ಟಮ್ ಎತ್ತರ, ಆಳ, ಕಾನ್ಟೂರ್, ಓರಿಯಂಟೇಶನ್ ಮತ್ತು ಸ್ಥಳೀಯ ಸ್ಥಾನಗಳನ್ನು ಲೆಕ್ಕಹಾಕುತ್ತದೆ.
ಒಂದು ಸಾಮಾನ್ಯ ವಿಧಾನವು ತ್ರಿಕೋನಮಿತಿಯ ಅಳೆಯುವಿಕೆಯಾಗಿದೆ. ಈ ಪದ್ದತಿಯಲ್ಲಿ, ಲೇಜರ್ ಕಣ್ಣಿರಣೆ ಅಥವಾ ರೂಪಿತ ಬೆಳಕು ಮಾದರಿ ವಸ್ತುವಿನ ಮೇಲೆ projectedಿಸಲಾಗುತ್ತದೆ. ಪ್ರಕ್ಷಿಪ್ತ ಬೆಳಕು ಬೇರೆ ಸಹಜದಿಂದ ಕ್ಯಾಮೆರಾ ಅಥವಾ ಸೆನ್ಸರ್ ಮೂಲಕ ವೀಕ್ಷಿಸಲಾಗುತ್ತದೆ. ಬೆಳಕು ಮೂಲ, ವಸ್ತು ಮತ್ತು ಕ್ಯಾಮೆರಾ ನಡುವಿನ ಜ್ಯಾಮಿತೀಯ ಸಂಬಂಧವನ್ನು ವಿಶ್ಲೇಷಿಸುತ್ತಾ, ಕಂಪ್ಯೂಟರ್ ನಿರ್ದಿಷ್ಟ ಮೇಲ್ಮಟ್ಟದ ಬಿಂದುಗಳಿಗೆ ಅಂತರವನ್ನು ಲೆಕ್ಕಹಾಕುತ್ತದೆ.
ಇನ್ನೊಂದು ವ್ಯಾಪಕವಾಗಿ ಬಳಸಲ್ಪಡುವ ವಿಧಾನವು ಸ್ಟೀರಿಯೋ ದೃಷ್ಟಿಯಾಗಿದೆ. ಈ ತಂತ್ರವು ವಿಭಿನ್ನ ಸ್ಥಳಗಳಲ್ಲಿ ನಿರ್ಧರಿತ ಎರಡು ಕ್ಯಾಮೆರಾಗಳನ್ನು ಬಳಸುತ್ತದೆ, ಹೇಗೆ ಬೇರೆಬೇರೆ ವೀಕ್ಷಣಾ ಕೋನಗಳಿಂದ ಆಳವನ್ನು ಅಂದಾಜಿಸಲು ಬಳಸುತ್ತದೆ ಎಂಬುದನ್ನು ಹೋಲಿಸುತ್ತದೆ. ಎರಡು ಕ್ಯಾಮೆರಾಗಳೂ ಒಂದೇ ವಸ್ತುವಿನ ಚಿತ್ರಗಳನ್ನು ಒಂದೇ ಬಾರಿಗೆ ಕ್ಲಿಪ್ ಮಾಡುತ್ತವೆ. ಸಿಸ್ಟಮ್ ಹೊಂದುವ ಚಿತ್ರ ವೈಶಿಷ್ಟ್ಯಗಳನ್ನು ಹೋಲಿಸುತ್ತದೆ ಮತ್ತು ಎರಡು ದೃಶ್ಯಗಳ ನಡುವಿನ ವ್ಯತ್ಯಾಸಗಳಿಂದ ಆಳವಿಷಯಗಳನ್ನು ಲೆಕ್ಕಹಾಕುತ್ತದೆ.
ಅಂತರ ಆಧಾರಿತ ಅಳೆಯುವಿಕೆ ದೃಶ್ಯ ಸೆನ್ಸರ್ಗಳನ್ನು ತ್ರಿಜ್ಯಮಿತಿಯ ಡೇಟಾ ವರ್ಧಿಸಲು ಅನುಮತಿಸುತ್ತದೆ, ಹೆಚ್ಚು ಸುಲಭವಾಗಿ ಸಂಕೀರ್ಣಾಕಾರಗಳನ್ನು ಪರಿಶೀಲಿಸುವುದು, ವಸ್ತು ಪ್ರೊಫೈಲ್ಗಳನ್ನು ಅಳೆಯುವುದು, ಆಯಾಮವನ್ನು ಅಂದಾಜಿಸುವುದು ಮತ್ತು ನಿಖರವಾದ ವಸ್ತು ಸ್ಥಳಗಳನ್ನು ನಿರ್ಣಯಿಸುವುದು ಸಾಧ್ಯವಾಗುತ್ತದೆ.
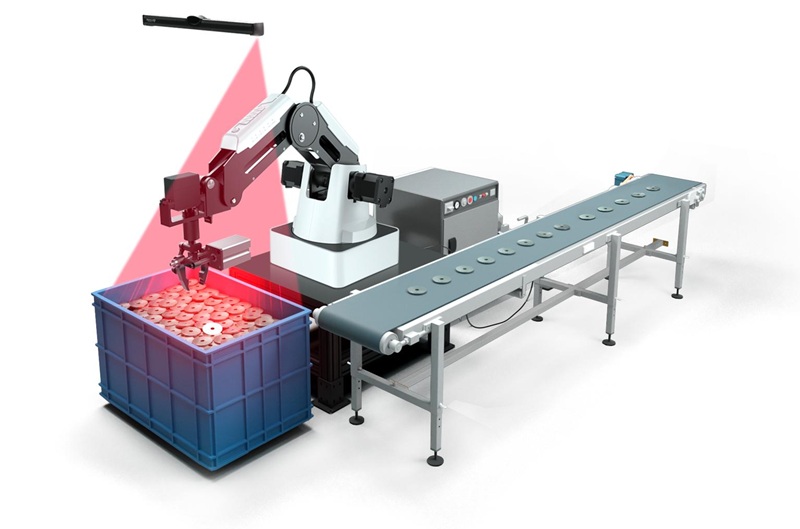
ಈ ಸಾಮರ್ಥ್ಯಗಳು ರೊಬೊಟಿಕ್ ಪಿಕಿಂಗ್, ಸ್ವಾಯತ್ತ ಅಸೆಂಬ್ಲಿ, ಪ್ಯಾಲಟೈಸಿಂಗ್, ಬಿನ್ ಪಿಕಿಂಗ್, ಆಯಾಮದ ಪರಿಶೀಲನೆ ಮತ್ತು 3D ಗುಣಮಟ್ಟದ ನಿರ್ವಹಣೆಯಂತಹ ಅಪ್ಲಿಕೇಶನ್ಗಳಲ್ಲಿ ವಿಶೇಷವಾಗಿ ಮುಖ್ಯವಾಗಿದೆ.
ವಸ್ತು ಪತ್ತೆ ಮತ್ತು ರೊಬೊಟಿಕ್ ಮಾರ್ಗದರ್ಶನವನ್ನು ಬೆಂಬಲಿಸುವುದು
ಈ ಮೂರು ಅಳೆಯುವಿಕೆ ದೃಷ್ಟಿಗಳು ಸಾಮಾನ್ಯವಾಗಿ ಏಕಕಾಲದಲ್ಲಿ ಒಬ್ಬ ದೃಷ್ಟಿ ವ್ಯವಸ್ಥೆಯೊಳಗೆ ಬಳಸಲಾಗುತ್ತವೆ. ತಮ್ಮ ಮುಖಚಾರತೆಯನ್ನು ಗುರುತಿಸಲು ಹರಿಯುವಿಕೆ ಚಿತ್ರವನ್ನು ಬಳಸಲಾಗಬಹುದು, ಶ್ರೇಣೀಬದ್ಧ ಆನ್ಲೈನ್ ಪ್ರಕ್ರಿಯೆ ವಸ್ತುವನ್ನು ಅದರ ಹಿನ್ನೋಟದಿಂದ ಭಿನ್ನಗೊಳಿಸುತ್ತವೆ ಮತ್ತು ಅಂತರ ಅಳೆಯುವುದು ತ್ರಿಜ್ಯಮಿತಿಯ ಸ್ಥಳೀಯ ಡೇಟಾ ಒದಗಿಸುತ್ತದೆ.
ಈ ತಂತ್ರಗಳನ್ನು ಒಂದುಗೂಡಿಸುವ ಮೂಲಕ, ದೃಶ್ಯ ಸೆನ್ಸರ್ಗಳು ವೈವಿಧ್ಯಮಯ ಕೈಗಾರಿಕಾ ಕಾರ್ಯಗಳನ್ನು ಮಾಡಬಹುದು. ಅವು ವಸ್ತುಗಳನ್ನು ಗುರುತಿಸಲು, ಆಯಾಮಗಳನ್ನು ಅಳೆಯಲು, ಆಕಾರಗಳನ್ನು ಗುರುತಿಸಲು, ಚಲನವಲನವನ್ನು ಅನುಸರಿಸಲು, ಅಸೆಂಬ್ಲಿ ಗುಣಮಟ್ಟವನ್ನು ಖಚಿತಪಡಿಸಲು, ವಸ್ತು ಓರಿಯಂಟೇಶನ್ ಅನ್ನು ನಿರ್ಧರಿಸಲು ಮತ್ತು ರೊಬೊಟಿಕ್ ವ್ಯವಸ್ಥೆಗಳಿಗಾಗಿ ದಿಕ್ಕು ಮಾಹಿತಿ ಒದಗಿಸಲು ಸಾಧ್ಯವಾಗುತ್ತವೆ.
ಪರಿಣಾಮವಾಗಿ, ದೃಶ್ಯ ಸೆನ್ಸರ್ಗಳು ಆಧುನಿಕ ಸ್ವಾಯತ್ತರಲ್ಲಿ ಅಗತ್ಯವಾದ ಅಂಶಗಳಾಗಿ మారಿವೆ. ಶಾರೀರಿಕ ಸಂಪರ್ಕ ಇಲ್ಲದೆ ಶುದ್ಧ ದೃಶ್ಯ ಮಾಹಿತಿಯನ್ನು ಒಯ್ಯುವ ಸಾಮರ್ಥ್ಯವು ವೇಗವಾದ ಪರಿಶೀಲನೆ, ಹೆಚ್ಚು ವಿಶ್ವಾಸಾರ್ಹ ಅಳೆಯುವಿಕೆ, ಸುಧಾರಿತ ಪ್ರೊಸೆಸ್ಸು ನಿಯಂತ್ರಣ ಮತ್ತು ನಿಖರವಾದ ರೊಬೊಟಿಕ್ ಮಾರ್ಗದರ್ಶನವನ್ನು ವ್ಯಾಪಕ ರೀತಿಯ ಕೈಗಾರಿಕಾ ಮತ್ತು ಉದ್ಯಮ ಅಪ್ಲಿಕೇಶನ್ಗಳಲ್ಲಿ ಒದಗಿಸುತ್ತದೆ.
ಫೋಟೋಇಲೆಕ್ಟ್ರಿಕ್ ಸೆನ್ಸರ್ಗಳು ಮತ್ತು ದೃಶ್ಯ ಸೆನ್ಸರ್ಗಳ ಹೋಲಣೆ
ಇಬ್ಬರ ತಂತ್ರಜ್ಞಾನದ ನಡುವಿನ ವ್ಯತ್ಯಾಸವನ್ನು ಅರ್ಥ ಮಾಡಿಕೊಳ್ಳುವುದು
ಫೋಟೋಇಲೆಕ್ಟ್ರಿಕ್ ಸೆನ್ಸರ್ಗಳು ಮತ್ತು ದೃಶ್ಯ ಸೆನ್ಸರ್ಗಳು ಸ್ವಾಯತ್ತಿತ ವ್ಯವಸ್ಥೆಗಳಲ್ಲಿ ವಸ್ತುಗಳನ್ನು ಪತ್ತೆಗಳನ್ನು ಮಾಡಲು ಮತ್ತು ಸಮೀಕ್ಷಿಸಲು ಬಳಸಲಾಗುತ್ತದೆ, ಆದರೆ ಸೆನ್ಸರ್ಗಳು ಒಯ್ಯಬಹುದಾದ ಮಾಹಿತಿ ಪ್ರಮಾಣದಲ್ಲಿ ಬಹಳ ವ್ಯತ್ಯಾಸವಿದೆ.
ಫೋಟೋಇಲೆಕ್ಟ್ರಿಕ್ ಸೆನ್ಸರ್ವನ್ನು ವಿಶೇಷವಾಗಿ ಒಂದು ನಿರ್ದಿಷ್ಟ ಸ್ಥಳದಲ್ಲಿ ಒಂದು ವಸ್ತು ಇರುತ್ತದೆ ಅಥವಾ ಇಲ್ಲ ಎಂಬುದನ್ನು ನಿರ್ಧರಿಸಲು ರೂಪಿಸಲಾಗಿದೆ. ಇದರ ಕಾರ್ಯ relatively ಸುಲಭವಾಗಿದೆ. ತಲಾ ಕೇಂದ್ರೀಯ ಪ್ರದೇಶಕ್ಕೆ ಬೆಳಕು ಬೀರುವ ಕಿರಿಯ ಬೆಳಕು ಹೊರಡಿಸಲಾಗಿದೆ ಮತ್ತು ಸೆನ್ಸರ್ ಆ ಕಿರಿದನ್ನು ಪ್ರತಿಬಿಂಬಿತ, ಅಡಚಣೆ ಅಥವಾ ಸ್ವೀಕರಿಸುತ್ತಿರುವುದನ್ನು ಗಮನಿಸುತ್ತಿದೆ. ಈ ಸಂಕೇತವನ್ನು ಆಧರಿಸಿ, ಸಿಸ್ಟಮ್ ಪತ್ತೆ ಪ್ರದೇಶದಲ್ಲಿ ವಸ್ತು ಪ್ರವೇಶಿಸಿದೆ ಎಂಬುದನ್ನು ನಿರ್ಧರಿಸುತ್ತದೆ.
ಈ ವಿಧಾನವು ಸರಳ ಸಂವೇದಿ ಕಾರ್ಯಗಳಿಗೆ ಪ್ರಭಾವಶಾಲಿ ಇದೆ, ಉದಾಹರಣೆಗೆ ಕೇವಲ ಖಾತೆಯ ಪ್ರಮಾಣವನ್ನು ಲೆಕ್ಕಹಾಕುವ, ಕೋರೆಯ ಬಾಗಿಲು ಒಯ್ಯುವ, ಭಾಗವನ್ನು ಖಚಿತಪಡಿಸುವ ಅಥವಾ ಉತ್ಪಾದನಾ ಪ್ರಕ್ರಿಯೆಯಲ್ಲಿ ಮುಂದಿನ ಹಂತವನ್ನು ಪ್ರಾರಂಭಿಸುವುದು. ಆದರೆ, ನೀಡುವ ಮಾಹಿತಿಯು ಸಾಮಾನ್ಯವಾಗಿ ಸರಳ ಪತ್ತೆ ಫಲಿತಾಂಶದಷ್ಟೇ ಮಿತವಾಗಿದೆ.
ದೃಶ್ಯ ಸೆನ್ಸರ್ಗಳು ನಿರೀಕ್ಷಣೆಗೆ ಒಬ್ಬ ಹೆಚ್ಚು ಉನ್ನತ ಮಟ್ಟದಲ್ಲಿ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತವೆ. ಒಬ್ಬಂತಹ ಬೆಳಕು ಸಂಕೇತವನ್ನು ಅವಲಂಬಿಸುವ ಬದಲು, ಇವು ವಸ್ತುವಿನ ಸಂಪೂರ್ಣ ಚಿತ್ರವನ್ನು ಹಿಡಿದಿತ್ತು ಮತ್ತು ಒಂದೇ ಬಾರಿಗೆ ಹಲವಾರು ದೃಶ್ಯ ವೈಶಿಷ್ಟ್ಯಗಳನ್ನು ವಿಶ್ಲೇಷಿಸುತ್ತವೆ. ಇದು ಸಿಸ್ಟಮ್ಗೆ ವಸ್ತುವಿನ ಸ್ಥಿತಿ ಅಥವಾ ವೈಶಿಷ್ಟ್ಯಗಳನ್ನು ಖಚಿತಪಡಿಸುವ ಬದಲು, ವಸ್ತುವಿನ ಬಗ್ಗೆ ವಿವರವಾದ ಮಾಹಿತಿಯನ್ನು ಒಂದೇ ವೇಳೆ ಸಂಜ್ಞಿಸುತ್ತಲು ಅನುಮತಿಸುತ್ತದೆ.
ಪರಿಶೀಲನಾ ಸಾಮರ್ಥ್ಯಗಳು
ಫೋಟೋಇಲೆಕ್ಟ್ರಿಕ್ ಸೆನ್ಸರ್ಗಳು ಮತ್ತು ದೃಶ್ಯ ಸೆನ್ಸರ್ಗಳ ನಡುವಿನ ಮುಖ್ಯ ವ್ಯತ್ಯಾಸವು ಪರಿಶೀಲನೆಯ ವೇಳೆ ಬಿಂಬಿತದ ಮಾಹಿತಿಯ ಪ್ರಮಾಣವಾಗಿದೆ.
ಸಾಮಾನ್ಯವಾಗಿ, ಫೋಟೋಇಲೆಕ್ಟ್ರಿಕ್ ಸೆನ್ಸರ್ವು ವಿವರಿಸಿದ ಸಾಧಾರಣ ಪ್ರಶ್ನೆಗೆ ಉತ್ತರಿಸುತ್ತವೆ, ಉದಾಹರಣೆಗಾಗಿವಸ್ತು ಬಂದಿದೆ, ಇಲ್ಲ, ಅಥವಾ ಪತ್ತೆ ಪ್ರದೇಶದಲ್ಲಿ ಸ್ಥಿತವಾಗಿದೆ. ಇದು ಹಲವಾರು ಸರಳ ಸ್ವಾಯತ್ತ ಕಾರ್ಯಗಳಿಗೆ ಆರ್ಎಫ್ಸಿ ಇದೆಯಾದರೂ, ವಸ್ತುವಿನ ಸ್ಥಿತಿಯನ್ನು ಅಥವಾ ವಿಶೇಷಣಗಳನ್ನು ಸಂಬಂಧಿಸಲು ಮಾಹಿತಿ ನೀಡುವುದಿಲ್ಲ.
ದೃಶ್ಯ ಸೆನ್ಸರ್ಗಳು ಹೆಚ್ಚು ಸಂಪೂರ್ಣ ಪರಿಶೀಲನೆಗಳನ್ನು ನಡೆಸಬಹುದು. ಒಂದು ಚಿತ್ರವನ್ನು ಹಿಡಿದ ನಂತರ, ಸಿಸ್ಟಮ್ ಆಕಾರ, ಗಾತ್ರ, ಸ್ಥಾನ, ಓರಿಯಂಟೇಶನ್, ಬಣ್ಣ, ಮೇಲ್ಮಟ್ಟದ ಸ್ಥಿತಿ, ಗುರುತಿಸುವಿಕೆ, ಮಾದರಿಗಳು, ಆಯಾಮಗಳು ಮತ್ತು ಅಸೆಂಬ್ಲಿ ವೈಶಿಷ್ಟ್ಯಗಳನ್ನು ಒಂದೇ ಪರಿಶೀಲನಾ ಚಕ್ರದಲ್ಲಿ ವಿಶ್ಲೇಷಿಸಬಹುದು.
ಉದಾಹರಣೆಗೆ, ಕಾನ್ವಾಯರ್ ಮೂಲಕ ಓಡುತ್ತಿರುವ ಉತ್ಪನ್ನವನ್ನು ಪರಿಗಣಿಸುತ್ತರೆ. ಫೋಟೋಇಲೆಕ್ಟ್ರಿಕ್ ಸೆನ್ಸರ್ ಕೇವಲ ಉತ್ಪನ್ನವನ್ನು ಕ್ರಮಬದ್ಧವಾಗಿ ಪರಿಶೀಲಣೆ ನಿಲ್ದಾಣದಲ್ಲಿ ಬರಲು ಖಚಿತಪಡಿಸಬಹುದು. ದೃಶ್ಯ ಸೆನ್ಸರ್ ಉತ್ಪನ್ನವು ಸರಿಯಾದ ಮಾದರಿಯಲ್ಲಿರುವುದನ್ನು ನಿರ್ಧರಿಸುತ್ತದೆ, ಅದರ ಆಯಾಮಗಳನ್ನು ಪರಿಶೀಲಿಸುತ್ತದೆ, ಲೇಬಲ್ಗಳ ಸ್ಥಳವನ್ನು ಪರಿಶೀಲಿಸುತ್ತದೆ, ಸರಿಯಾದ ಅಸೆಂಬ್ಲಿಯನ್ನು ಖಚಿತಪಡಿಸುತ್ತದೆ, ಮೇಲ್ಮಟ್ಟದ ದೋಷಗಳನ್ನು ಗುರುತಿಸುತ್ತದೆ ಮತ್ತು ರೊಬೊಟಿಕ್ ಹ್ಯಾಂಡ್ಲಿಂಗ್ಗಾಗಿ դրա ಸ್ಥಳವನ್ನು ಅಳತೆಯನ್ನು ಅಳೆಯುತ್ತದೆ.
ಒಂದು ಚಿತ್ರದಿಂದ ಹಲವಾರು ಪರಿಶೀಲನೆಗಳನ್ನು ನಿರ್ವಹಿಸಲಾಗುವುದರಿಂದ, ದೃಶ್ಯ ಅಳತೆಯನ್ನು ಹೊಂದಿಸುವ ಸಂವೇದಕಗಳು ಏಕಕಾಲದಲ್ಲಿ ಹೆಚ್ಚಿನ ಪರಿಶೀಲನೆ ಸಾಮರ್ಥ್ಯವನ್ನು ಒದಗಿಸುತ್ತವೆ.
ಸಾಧನದ ಅಗತ್ಯಗಳ ಕಡಿತ
ಪರಂಪರागत automation ವ್ಯವಸ್ಥೆಗಳಲ್ಲಿ, ನಿರಂತರ ಪರಿಶೀಲನಾ ಕಾರ್ಯಗಳನ್ನು ನಿರ್ವಹಿಸಲು ಹಲವಾರು ಫೋಟೋಇಲೆಕ್ಟ್ರಿಕ್ ಸಂವೇದಕಗಳನ್ನು ಕ್ವಾಲಿಟಿ ನೀಡಬೇಕಾಗಿತ್ತು.
ಉದಾಹರಣೆಗೆ, ಒಂದು ಸಂವೇದಕ ಉತ್ಪನ್ನದ ಉಪಸ್ಥಿತಿಯನ್ನು ಪತ್ತೆಹಚ್ಚಬಹುದು, ಇನ್ನೊಂದು ಗಾತ್ರವನ್ನು ಪರಿಶೀಲಿಸಬಹುದು, ಮೂರುನೆಡೆಗೆ ಒರೇಟೇಶನ್ ಅನ್ನು ಖಚಿತಪಡಿಸುತ್ತವೆ, ಮತ್ತು ಇನ್ನಷ್ಟು ಸಂವೇದಕಗಳನ್ನು ಸ್ಥಾನದ ಪರಿಶೀಲನೆ ಅಥವಾ ಉತ್ಪನ್ನಗಳನ್ನು ಗಣನೆ ಮಾಡಲು ಸ್ಥಾಪಿಸಬಹುದು. ಪರಿಶೀಲನಾ ಅಗತ್ಯಗಳು ಹೆಚ್ಚಾಗುತ್ತಿದ್ದಂತೆ, ಸಂವೇದಕರ ಸಂಖ್ಯೆ, ಬೆಂಬಲ ಬ್ರಾಕೆಟ್ಗಳು, ಕೇಬಲ್ಗಳು ಮತ್ತು ಸಮೂಹ ಬಿಂದಿಗಳು ಹೆಚ್ಚಾಗುತ್ತವೆ.
ದೃಶ್ಯ ಸಂವೇದಕಗಳು ಸಾಮಾನ್ಯವಾಗಿ ಈindividual ಸಾಧನಗಳನ್ನು ಅಥವಾ ಸಹಜವೆಂದು ಆರಿಸಿಕೊಂಡಿರಬಹುದು. ಒಂದು ಒಬ್ಬ ಕ್ಯಾಮರಾ ಚಿತ್ರದಲ್ಲಿ ಹೆಚ್ಚು ಮಾಹಿತಿಯನ್ನು ಒಳಗೊಂಡಿದೆ, ಇದು ಏಕೆಂದರೆ ಸಾಕಷ್ಟು ವಿವರಗಳನ್ನು ಸಮಾನವಾಗಿ ವಿಶ್ಲೇಷಿಸಬಹುದು. ಹಲವಾರು ವಿಭಜಿತ ಸಂವೇದಕ ಸಾಧನಗಳನ್ನು ಸ್ಥಾಪಿಸುವ ಬದಲಿಗೆ, ಒಂದು ಏಕೀಕೃತ ವ್ಯವಸ್ಥೆಯಲ್ಲಿನ ಹಲವಾರು ನಿರೀಕ್ಷಣಾ ಕಾರ್ಯಗಳನ್ನು ನಿರ್ವಹಿಸಲು ಒಬ್ಬ ದೃಶ್ಯ ಸಂವೇದಕ ಬಳಸಬಹುದು.
ಸಾಧನದಲ್ಲಿ ಈ ಕಡಿತದಿಂದ, ವ್ಯವಸ್ಥೆಯ ವಿನ್ಯಾಸವನ್ನು ಸರಳಗೊಳಿಸಲು, ಕೇಬಲ್ ಸಂಕೀರ್ಣತೆಯನ್ನು ಕಡಿಮೆ ಮಾಡಲು, ಸ್ಥಾಪನೆಯ ಜಾಗವನ್ನು ಗಟ್ಟಿ ಮಾಡಲು ಮತ್ತು ನಿರಂತರ ನಿರ್ವಹಣೆಯ ಅಗತ್ಯಗಳನ್ನು ಕೀಳ್ಮಟ್ಟವಿಲ್ಲದೆ ಮಾಡುತ್ತದೆ.
ಸ್ಥಾನ ಮತ್ತು ಅಂಗಲಕ್ಷಣ ಬದಲಾವಣೆಗೆ ಆನುರೂಪತೆ
ದೃಶ್ಯ ಅಭಿವ್ಯಕ್ತಿ ಸಮೀಕ್ಷೆಗಳ ಅತ್ಯಂತ ಪ್ರಮುಖ ಲಾಭಗಳಲ್ಲಿ ಒಂದಾದದ್ದು ಉತ್ಪನ್ನದ ಸ್ಥಾನ ಮತ್ತು ಆಂಗಸಾಹಿತ ಬದಲಾವಣೆಗಳನ್ನು ಮೈ ನೀತಿಯನ್ನು ನಿರ್ವಹಿಸುವ ಸಾಮರ್ಥ್ಯ.
ಬಹಳಷ್ಟು ಫೋಟೋಇಲೆಕ್ಟ್ರಿಕ್ ಸಂವೇದಕ ಬಳಕೆಗಳಲ್ಲಿ, ವಸ್ತುಗಳು ನಿರಂತರ ಸಮಾನತೆಯಲ್ಲಿ ನಿರೋಧಿತ ಸ್ಥಳವನ್ನು ಹಾರಿಯಬೇಕು. ವಸ್ತುಗಳ ಸ್ಥಾನ ಸಂವೇದಕಕ್ಕೆ ಪತ್ತೆ ಶ್ರೇಣಿಯಿಂದ ಅತಿಯಾಗಿ ಸಂತೋಷ ಪಡುವುದರಿಂದ, ತಪ್ಪು ಓದುಗಳನ್ನು ಸಂಭವಿಸಲು ಸಾಧ್ಯವಾಗುತ್ತದೆ. ಈ ಸಮಸ್ಯೆಯನ್ನು ತಪ್ಪಿಸಲು, ತಯಾರಕರು ಸಾಮಾನ್ಯವಾಗಿ ಮಾರ್ಗ ರೈಲುಗಳು, ಫಿಕ್ಚರ್ಗಳು, ಸ್ಥಳೀಕರಣ ಯಂತ್ರಗಳು ಅಥವಾ ಸಿದ್ಧಪಡಿಸಲು ಆಡಳಿತವನ್ನು ಬಳಸಬಹುದು.
ದೃಶ್ಯ ಸಂವೇದಕಗಳು ಸಂಪೂರ್ಣ ಚಿತ್ರವನ್ನು ಪರಿಶೀಲಿಸುತ್ತಿವುದರಿಂದ ಹೆಚ್ಚು ಸುಲಭತೆ ಒದಗಿಸುತ್ತವೆ, ಏಕೆಂದರೆ ಅದು ಏಕಕಾಲದಲ್ಲಿ ಒಂದೇ ಪತ್ತೆ ಬಿಂದಿಯನ್ನು ಪೆಟ್ಟೆಯಲ್ಲಿ ಅಧಿಕಾರ ಮಾಡುತ್ತಿಲ್ಲ. ಕಾರ್ಯಪಥದಲ್ಲಿ ಕ್ರಿಯೆ ವರ್ಣಿಸಿದಾಗ, ವಿಷಯವು ಕ್ಯಾಮರಾ ದೃಶ್ಯವನ್ನು ಸ್ವಲ್ಪ ಬಾರದಾಗ, ಚಿತ್ರ ಸಂಕಲನ ಅಲ್ಗೋರಿ ಸೃಷ್ಟಿ ಸಹಜವಾಗಿ ವಸ್ತುವನ್ನು ಗುರುತಿಸಲು ಮತ್ತು ಪರಿಶೀಲನಾ ಕಾರ್ಯವನ್ನು ಮುಂದುವರಿಸಲು ಸಾಧ್ಯವಾಗುತ್ತದೆ.
ಉದಾಹರಣೆಗೆ, ಒಂದು ಪ್ಯಾಕೇಜ್ ನಿರೀಕ್ಷಿತ ಸ್ಥಳದಿಂದ ಸ್ವಲ್ಪ ಪಲಕ ಬರುವಾಗ, ದೃಶ್ಯ ಸಂವೇದಕ ಒಳಗೊಂಡ ಚಿತ್ರದಲ್ಲಿ ಪ್ಯಾಕ್ ಅನ್ನು ಗುರುತಿಸಬಹುದು, ಅದರ ನಿಖರ ಸ್ಥಳವನ್ನು ನಿರ್ಧರಿಸುತ್ತದೆ ಮತ್ತು ಆ ನವೀಕೃತ ಸ್ಥಾನವನ್ನು ಉಪಯೋಗಿಸುತ್ತಾರೆ. ಈ ಸಾಮರ್ಥ್ಯವು ಹೆಚ್ಚಿನ ಸ್ವೀಕಾರವಾದ ಯಾಂತ್ರಿಕ ಸ್ಥಳೀಯ ತಂಡಗಳಿಗೆ ಆದಾಯವನ್ನು ವರ್ಗರಾವಣಿಸುತ್ತವೆ.
ಪರಿಣಾಮವಾಗಿ, ಸಾಂದರ್ಭಿಕ ವಸ್ತುಗಳು ನಂತರ ಸ್ವಲ್ಪ ಸ್ಥಾನ, ರೊಟ್ಟೇಶನ್ ಅಥವಾ ಅಂಗಸಹಿತ ಬದಲಾವಣೆಗಳಿಗೆ ಬರುತ್ತವೆ.
ಸಾಫ್ಟ್ವೇರ್ ಸುಲಭತೆ ಮತ್ತು ಉತ್ಪನ್ನ ಬದಲಾಯಿಸುವಿಕೆ
ದೃಶ್ಯ ಸಂವೇದಕಗಳ ಮತ್ತೊಂದು ಪ್ರಮುಖ ಲಾಭವೇನೆಂದರೆ, ಅವುಗಳ ಸಾಫ್ಟ್ವೇರ್ ಆಧಾರಿತ ಸ್ವಾತಂತ್ರ್ಯವು.
ಹಲವಾರು ಫೋಟೋಇಲೆಕ್ಟ್ರಿಕ್ ವ್ಯವಸ್ಥೆಗಳಲ್ಲಿ, ಉತ್ಪಾದನಾ ಅಗತ್ಯಗಳಿಗೆ ಬದಲಾವಣೆಗಳು ಶಾರೀರವಾದ ಪರಿಕರಗಳನ್ನು ಅಗತ್ಯವಾಗಬಹುದು. ಹೊಸ ಸಂವೇದಕಗಳನ್ನು ಸ್ಥಾಪಿಸಲು, ಬೆಂಬಲ ಸ್ಥಾನಗಳನ್ನು ಸರಿಪಡಿಸಲು ಅಥವಾ ಪತ್ತೆ ಕೇಂದ್ರಿತಿಗಳನ್ನು ಪುನರದ್ದೇಶಿತ ಪೂಜ್ಯವಾಗಬಹುದು. ಈ ಬದಲಾವಣೆಗಳು ಒಟ್ಟಿಗೆ ವ್ಯವಸ್ಥೆಯ ಹೊಂದಾಣಿಕೆಯನ್ನು ಹೆಚ್ಚಿಸುತ್ತವೆ.
ದೃಶ್ಯ ಸಂವೇದಕಗಳನ್ನು ಹಲವಾರು ಬಾರಿ ಸಾಫ್ಟ್ವೇರ್ ವಿನ್ಯಾಸ ಮೂಲಕ ಸುಧಾರಿಸುತ್ತವೆ. ಪರಿಶೀಲನಾ ನಿಯಮಗಳು, ಮೆಟ್ರಿಕ್ ಮಿತಿಗಳು, ಉದಾಹರಣೆ ಮಾದರಿಗಳು ಮತ್ತು ಸ್ವೀಕಾರ ವಿದ್ಯಮಾನಗಳಲ್ಲಿ ಶ್ರೇಣವಿದೆ ಭಿನ್ನಸು, ಆಸ್ಪತ್ರೆಗಳ ಉದ್ದೇಶದೊಂದಿಗೆ ಅತ್ಯಂತ ಶಾರೀರವಾದ ಪರಿಕರ ಬದಲಾವಣೆಗಳಿಗೆ ಅನ್ವೇಯವುಳ್ಳವು.
ಉದಾಹರಣೆಗೆ, ಒಬ್ಬ ನೈಮಿತ್ರ ಮಾದರಿಯ ಹಳೆಯ ಮಾದರಿಯ ಮೇಲೆ ಹಲವಾರು ಉತ್ಪನ್ನ ಮಾದರಿಗಳನ್ನು ಜರ್ಮಾದರೂ ತಯಾರಿಸುತ್ತಾನೆ. ಸಂವೇದಕಗಳನ್ನು ಬದಲಾಯಿಸಲು ಅಥವಾ ಪರೀಕ್ಷೆಯ ಕೇಂದ್ರವನ್ನು ಪುನರ್ ವಿನ್ಯಾಸವಿಲ್ಲ, ಕಾರ್ಯಾಧ್ಯಕ್ಷರು ವಿನ್ಯಾಸವನ್ನು ಬದಲಾಯಿಸಲು ಅಥವಾ ಹೊಸ ಉತ್ಪನ್ನಕ್ಕಾಗಿ ಪೂರಣವನ್ನು ಬಳಸಬಹುದು. ನಂತರ ದೃಶ್ಯ ಸಂವೇದಕವು ಆ ಉತ್ಪನ್ನಕ್ಕೆ ಸಂಬಂಧಿಸಿದ ಸೂಕ್ತ ಪರಿಶೀಲನಾ ನಿಯಮಗಳನ್ನು लागूಿಸುತ್ತದೆ.
ಈ ಮೆಲುಕು ದೃಶ್ಯ ಸಂವೇದಕಗಳನ್ನು ಹೆಚ್ಚು ಮೈಬಗ್ಗೆ ತಯಾರಿತ ಮತ್ತು ಪಡೆಯುವ ಉತ್ಪન્ન ಭಿನ್ನತೆಗಳಿಗೆ ಸುಪಾದ ಉಂಟು ಮಾಡುವುದನ್ನು ಸಾಧ್ಯವಾಗಿಸುತ್ತದೆ.
ಮುಖ್ಯ ಪ್ರಯೋಜನಗಳ ಸಾರಾಂಶ
ಫೋಟೋಇಲೆಕ್ಟ್ರಿಕ್ ಸಂವೇದಕಗಳು ಸರಳ ಪತ್ತೆಯ ಕಾರ್ಯಗಳಿಗೆ ಹೆಚ್ಚು ಕಾರ್ಯಕ್ಷಮವಾಗುತ್ತವೆ, ಆದರೆ ದೃಶ್ಯ ಸಂವೇದಕಗಳು ಹೆಚ್ಚು ವ್ಯಾಪಕವಾದ ಸಮೀಕ್ಷಣಾ ಸಾಮರ್ಥ್ಯವನ್ನು ಒದಗಿಸುತ್ತವೆ.
ಚಿತ್ರಗಳನ್ನು ಹಿಡಿದು ವಿಶ್ಲೇಷಿಸುವ ಮೂಲಕ, ದೃಶ್ಯ ಸಂವೇದಕಗಳು ಒಂದೇ ಸಮಯದಲ್ಲಿ ಹಲವಾರು ಉತ್ಪನ್ನ ವೈಶಿಷ್ಟ್ಯಗಳನ್ನು ಮೊದಲು ನಡೆಸುತ್ತವೆ, ಸ್ವಾಯತ್ತ ಅಣಗರ ಅವರ ಅಗತ್ಯವಾಗಿ ಸೂಚಿಸಿದ್ದೇಶಕ್ಕೆ ಕಡಿಮೆ ಮಾಡಲು. ಅವರ ಉಪಯೋಗದಲ್ಲಿ ವಸ್ತುಗಳ ಸ್ಥಾನಗಳ ಬದಲಾವಣೆಗಳನ್ನು ಹೊಂದಿಕೊಂಡುವು, ಸಾಫ್ಟ್ವೇರ್ ಹಾರ್ಡ್ವೇರ್ ಬದಲಾವಣೆಗಳ ಮೂಲಕ ನಿರಂತರ ಉತ್ಪನ್ನ ತಲುಪಲು ಸಹಾಯ ಮಾಡುತ್ತವೆ ಮತ್ತು ಸರಳ ಉಪಸ್ಥಿತಿ ಪತ್ತೆಗೊಮ್ಮಲು ತೆರವುಗೊಳಿಸುತ್ತವೆ.
ಈ ಕಾರಣಗಳಿಂದ, ದೃಶ್ಯ ಸಂವೇದಕಗಳು ನಿರತವಾಗಿ ಕಂಪನಿಗಳಲ್ಲಿನ ತಂತ್ರಜ್ಞಾನದ ಪ್ರಮುಖ ತಂತ್ರಜ್ಞವಾಗುತ್ತದೆ, ಇದರಿಂದಾಗಿ ಸ್ವಾಯತ್ತ ವಿವರಣೆಗಳಲ್ಲಿ ಉಷ್ಣೋಧನ, ಗುಣಕಾರಿ ನಿಯಂತ್ರಣ, ಪ್ಯಾಕೇಜಿಂಗ್ ವ್ಯವಸ್ಥೆಗಳು, ಅಸೆಂಬ್ಲಿ ಕಾರ್ಯಗಳು ಮತ್ತು ಮುಂದಿನ ಉತ್ಪಾದನೆಯ ಪರಿಸರಗಳಲ್ಲಿ, ವೈಯಕ್ತಿಕತೆ, ಖಚಿತತೆ ಮತ್ತು ಮಾಹಿತಿಯ ಶ್ರೀಮಂತರ ಮೂಲಕ ಜತೆಗೊಳ್ಳುವಿಕೆಗೆ ಅಗತ್ಯವಾಗಿದೆ.
ಯಂತ್ರದ ದೃಷ್ಟಿಯ ಮತ್ತು ದೃಶ್ಯ ಸಂವೇದಕಗಳ ಅನ್ವಯಗಳು
ಮೆಶಿನ್ ವಿಷನ್ ಮತ್ತು ದೃಶ್ಯ ಸೆನ್ಸರ್ಗಳನ್ನು ವಸ್ತುಗಳನ್ನು ಪತ್ತೆಹಚ್ಚುವುದು, ಗುರುತಿಸುವುದು, ಪ್ರಮಾಣಿತಗೊಳಿಸುವುದು, ಪರಿಶೀಲಿಸುವುದು, ವರ್ಗೀಕರಿಸುವುದು, ಸ್ಥಾನಗೊಳ್ಳುವುದು ಅಥವಾ trak ಮಾಡಲು ಬಳಸಲಾಗುತ್ತದೆ. ಚಿತ್ರಗಳನ್ನು ಹಿಡಿದು ಮತ್ತು ಸ್ವಯಂಚಾಲಿತವಾಗಿ ವಿಶ್ಲೇಷಿಸುವ ಮೂಲಕ, ಈ ವ್ಯವಸ್ಥೆಗಳು ಕೈಗಾರಿಕಾ ವಿಧಾನಗಳ ಮೂಲಕ ತಲುಪಿಸಲು ಕಷ್ಟವಾಗುವ ವೇಗ ಮತ್ತು ವಿಶ್ವಾಸಾರ್ಹತೆಯ ಮಟ್ಟದಲ್ಲಿಯ ಪರೀಕ್ಷಾ ಮತ್ತು ಪ್ರಮಾಣೀಕರಣ ಕಾರ್ಯಗಳನ್ನು ನಡೆಯಿಸಬಲ್ಲವು.
ಸಾಮಾನ್ಯ ಪ್ರಕ್ರಿಯೆಯು ಚಿತ್ರ ವಶ್ಯವಹನೆಯೊಂದಿಗೆ ಆರಂಭವಾಗುತ್ತದೆ. ಕ್ಯಾಸ್ತರ್ಗಳು ಗುರಿ ವಸ್ತುವಿನ ಚಿತ್ರಗಳನ್ನು ಹಿಡಿಯುತ್ತವೆ ಮತ್ತು ಚಿತ್ರ-ಸಂಪಾದನಾ ಸಾಫ್ಟ್ವೇರ್ ಪ್ರಮುಖ ದೃಶ್ಯ ಮಾಹಿತಿ ಹೀರುತ್ತದೆ. ನಂತರ, ವ್ಯವಸ್ಥೆ ಸಂಗ್ರಹಿತ ಮಾಹಿತಿಗಳನ್ನು ಮುನ್ನಿರೂಪಿತ ಪ್ರಮಾಣಗಳು, ಉಲ್ಲೇಖದ ಚಿತ್ರಗಳು ಅಥವಾ ಪ್ರಮಾಣ ನಿರ್ಣಯಗಳೊಂದಿಗೆ ಹೋಲಿಸುತ್ತದೆ. ಫಲಿತಾಂಶಗಳ ಆಧಾರವಾಗಿ, ಇದು ಪರೀಕ್ಷಾ ನಿರ್ಣಯಗಳನ್ನು ಉತ್ಪಾದಿಸಬಲ್ಲದು, ಪ್ರಮಾಣೀಕರಣದ ಮಾಹಿತಿಯನ್ನು ಒದಗಿಸುತ್ತದೆ, ಅಲಾರ್ಮ್ಗಳನ್ನು ಉಂಟುಮಾಡುತ್ತದೆ, ರೊಬೊಟ್ಸ್ಗಳನ್ನು ನಿರ್ಗಮಿಸುತ್ತದೆ ಅಥವಾ ಉತ್ಪಾದಕ ಸಜ್ಜೆಗಳನ್ನು ನಿಯಂತ್ರಿಸುತ್ತದೆ.
ಮೆಶಿನ್ ವಿಷನ್ ಶಾರೀರಿಕ ಸಂಪರ್ಕವನ್ನು ಇಲ್ಲದೆ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತಿರುವುದರಿಂದ, ಇದು ನಾಜೂಕಾದ ಉತ್ಪನ್ನಗಳು, ಉನ್ನತ ವೇಗದ ಉತ್ಪಾದನಾ ಸಾಲುಗಳು, ಅಪಾಯಕಾರಿ ಪರಿಸರಗಳು ಮತ್ತು ಖಚಿತ ಪ್ರಮಾಣೀಕರಣ ಕಾರ್ಯಗಳಿಗೆ ಸೂಕ್ತವಾಗಿದೆ. ವೇಗ, ಶುದ್ಧತೆಗೆ, ಪುನರಾವೃತ್ತತೆ ಮತ್ತು ಸ್ವಯಂಚಾಲನೆಯ ಸಾಮರ್ಥ್ಯದ ಸಮಾವೇಶವು ಹಲವಾರು ಕೈಗಾರಿಕೆಗಳಲ್ಲಿ ವ್ಯಾಪಕ ಸ್ವೀಕೃತಿಗೆ ಕಾರಣವಾಗಿದೆ.
ಕೃಷಿ
ಕೃಷಿ ಮೆಶಿನ್ ವಿಷನ್ಗಾಗಿ ಬೆಳೆಯುತ್ತಿರುವ ಅನ್ವಯ ಪ್ರದೇಶಗಳಲ್ಲಿ ಒಂದಾಗಿದೆ. ಆಧುನಿಕ ಕೃಷಿ ಕಾರ್ಯಗಳು ಉತ್ಪನ್ನದ ಗುಣಮಟ್ಟವನ್ನು ಸುಧಾರಿಸಲು, ಶ್ರಮದ ಅವಶ್ಯಕತೆಗಳನ್ನು ಕಡಿಮೆ செய்வಂತ ರೂಪಾಂತರವು ದೃಶ್ಯ ಸೆನ್ಸಿಂಗ್ ವ್ಯವಸ್ಥೆಗಳನ್ನು ಹೆಚ್ಚು ಉತ್ಪಾದಿಸುತ್ತದೆ ಮತ್ತು ಡೇಟಾ ಆಧಾರಿತ ನಿರ್ಧಾರ ಕ್ಲೌಡ್ಗಳನ್ನು ಬೆಂಬಲಿಸುತ್ತದೆ.
ಮೆಶಿನ್ ವಿಷನ್ ಸಾಮಾನ್ಯವಾಗಿ ಬಳಸಲಾಗುತ್ತದೆ:
• ಹಣ್ಣು ಗುಣಮಟ್ಟದ ಪರಿಶೀಲನೆ
• ಹಣ್ಣು ಸಂಪೂರ್ಣತೆ ಮೌಲ್ಯಮಾಪನ
• ಕೃಷಿ ಬೆಳೆಯುವನ್ನು ಪರಿಶೀಲಿಸುತ್ತಿದೆ
• ಕಾಳು ಪತ್ತೆಹಚ್ಚುವುದು
ಹಣ್ಣು ವರ್ಗೀಕರಣ ಕಾರ್ಯದಲ್ಲಿ, ಉತ್ಪನ್ನಗಳು ಪರ್ಯಾಯ ರೀತಿಯೊಂದರ ಬಗ್ಗೆ ಸಾಗಿಸುತ್ತವೆ, ಏಕೆಂದರೆ ಹಲವಾರು ಕ್ಯಾಮೆರಾ ವಿವಿಧ ಕೋಣಿಯಲ್ಲಿಂದ ಚಿತ್ರಗಳನ್ನು ಹಿಡಿಯುತ್ತವೆ. ಈ ಬಹು-ದೃಶ್ಯಣದ ಪರಿಶೀಲನೆಯ ವಿಧಾನವು ಒಂದೇ ಪರಿಶೀಲನಾ ಚಕ್ರದಲ್ಲಿ ಹಣ್ಣು ಮೇಲ್ಮಟ್ಟದ ದೊಡ್ಡ ಭಾಗವನ್ನು ಪರೀಕ್ಷಿಸಲು ಅವರು ठेवುತ್ತದೆ.
ಉದಾಹರಣೆಗೆ, ಆಪ್ಲ್ ವಿಂಗಡನಾ ವ್ಯವಸ್ಥೆಯಲ್ಲಿ, ಆಪ್ಲ್ಗಳು ತಿರುಗಿಸುತ್ತಾದಾಗ ಅಥವಾ ಪರಿಶೀಲನಾ ನಿಲ್ದಾಣದ ಮೂಲಕ ಸಾಗಿದಾಗ ಕ್ಯಾಮೆರಾಗಳು ಚಿತ್ರಗಳನ್ನು ಹಿಡಿಯುತ್ತವೆ. ಸಾಫ್ಟ್ವೇರ್ ಮೆಟ್ಟಿಲಿನ ಬಣ್ಣ, ರೂಪ, ಗಾತ್ರ, ಹೊಡೆಯುವುದು, ದಾಗುಗಳು, ಫೇಟ್ಚುಗಳು ಮತ್ತು ಇತರ ದೃಶ್ಯ ದೋಷಗಳನ್ನು ವಿಶ್ಲೇಷಿಸುತ್ತದೆ. ಮುನ್ನಿರೂಪಿತ ವರ್ಗೀಕರಣ ಪ್ರಮಾಣಗಳ ಆಧಾರವಾಗಿ, ಪ್ರತಿ ಆಪಲ್ ತAutom ಅದಕ್ಕೆ ಸೂಕ್ತವಾದ ಗುಣಮಟ್ಟದ ವಿಭಾಗಕ್ಕೆ ಪ್ರತ್ಯೇಕವಾಗಿ ಪರಿಗಣಿಸಲಾಗುತ್ತದೆ.
ಮೆಶಿನ್ ವಿಷನ್ ಕೃಷಿ ನಿರ್ವಹಣೆಯನ್ನು ಸಹ ಬೆಂಬಲಿಸುತ್ತದೆ. ಟ್ರ್ಯಾಕ್ಟರ್ಗಳಲ್ಲಿ, ಡ್ರೋನ್ಗಳಲ್ಲಿ ಅಥವಾ ಕ್ಷೇತ್ರ-ನಿರೀಕ್ಷಣಾ ವ್ಯವಸ್ಥೆಗಳಲ್ಲಿ ಹಾಕಿರುವ ಕ್ಯಾಮೆರಾಗಳಿಂದ ಸಂಗ್ರಹಿಸಲಾದ ಚಿತ್ರಗಳನ್ನು ಕೃಷಿ ಬೆಳೆಯುವ, ಆರೋಗ್ಯಕರ ಬೆಳೆಯುವದು, ಸಂಪೂರ್ಣತೆ ಮಟ್ಟವನ್ನು ಅಂದಾಜಿಸುವ ಮತ್ತು ಬೆಳೆದ ಪ್ರದೇಶಗಳಲ್ಲಿ ಕಾಳುಗಳನ್ನು ಪತ್ತೆಹಚ್ಚಲು ಬಳಸಬಹುದು.
ಈ ಸೌಲಭ್ಯಗಳನ್ನು ದೃಷ್ಟಿಯಿಂದ, ಕೃಷಿ ಅನ್ವಯಗಳು ವಿಶೇಷ ಸಮಸ್ಯೆಗಳನ್ನು ಹೊಂದಿವೆ. ಹೊರಗಿನ ಪರಿಸರವು ಸಾಮಾನ್ಯವಾಗಿ ಬದಲಾದ ಸೂರ್ಯನ ಬೆಳಕು, ನ_shadow ಕಳುಹಿಸುತ್ತದೆ, ಹವಾಮಾನ ವಿಚಲನಗಳು, ಸಂಕೀರ್ಣ ಹಿನ್ನೆಲೆಗಳು, ಧೂಳು ಮತ್ತು ಬೆಳೆಗೆಲ್ಲ ಸಾಕ್ಷಾತ್ಕಾರಗಳ ನಡುವಿನ ನೈಸರ್ಗಿಕ ವ್ಯತ್ಯಾಸವನ್ನು ಒಳಗೊಂಡಿವೆ. ಈ ಪ್ರತಿಯೊಂದು ಅಂಶವು ಚಿತ್ರ ಗುಣಮಟ್ಟ ಮತ್ತು ಪರಿಶೀಲನಾ ಶುದ್ಧತೆ ಮೇಲೆ ಪರಿಣಾಮ ಬೀರುವುದರಿಂದ, ನಿತ್ಯವಾಗಿ ನಡೆಸುವ ಸಂಶೋಧನೆಗಳು ಮೆಶಿನ್ ವಿಷನ್ ವ್ಯವಸ್ಥೆಗಳ ವಿಶ್ವಾಸಾರ್ಹತೆಯ ಮತ್ತು ಶ್ರೇಣಿಯಲ್ಲಿರುವತ್ತ ಏರುವ ಕೋಸಲು ಮುಂದುವರಿಸುತ್ತವೆ.
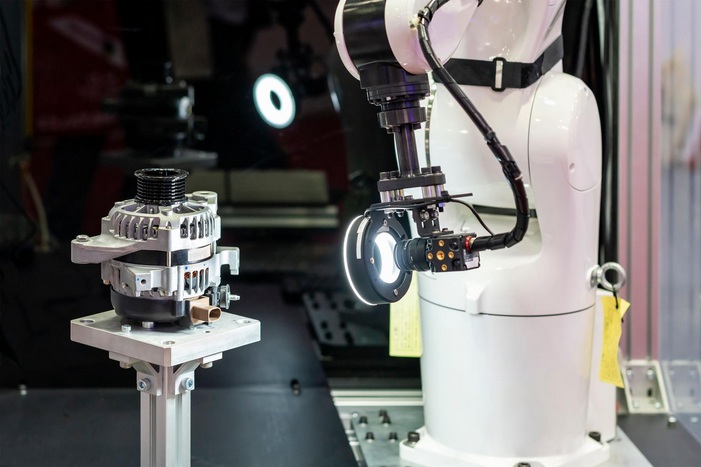
ಕೈಗಾರಿಕಾ ಉತ್ಪಾದನೆ
ಕೈಗಾರಿಕಾ ಉತ್ಪಾದನೆ ಮೆಶಿನ್ ವಿಷನ್ನ ಸ್ಥಾಪಿತ ಮತ್ತು ವ್ಯಾಪಕವಾಗಿ ಅಂಗೀಕರಿಸಿದ ಕ್ಷೇತ್ರಗಳಲ್ಲಿ ಒಂದಾಗಿದೆ.
ಕಾರ್ಖಾನೆ ಪರಿಸರದಲ್ಲಿ, ಉತ್ಪನ್ನಗಳು ಹಲವಾರು ಉತ್ಪಾದನಾ ಹಂತಗಳ ಮೂಲಕ ಸಾಗುತ್ತದೆ ಮತ್ತು ಗುಣ ಮತ್ತು ಶ್ರೇಣೆಯನ್ನು ಖಚಿತಪಡಿಸಲು ಪುನರಾವೃತ್ತ ಪರಿಶೀಲನೆ ಅಗತ್ಯವಿದೆ. ಉತ್ಪನ್ನಗಳು ಕಡಿಮೆ ಇದ್ದಾಗ, ಉತ್ಪಾದನೆ ವೇಗ ಹೆಚ್ಚು ಇದ್ದಾಗ ಅಥವಾ ಪರಿಶೀಲನೆ ಪ್ರಮಾಣತ್ಯಾದಿ ಸಂಕೀರ್ಣವಾದಾಗ ಕೈಗಾರಿಕ ಪರಿಶೀಲನೆ ಕಷ್ಟವಾಗಬಹುದು. ಮೆಶಿನ್ ವಿಷನ್ ಈ ಸವಾಲುಗಳನ್ನು ಸ್ವಯಂಚಾಲಿತವಾಗಿ ಹಾಗೂ ಸುದೀರ್ಘವಾಗಿ ಮಾಡಿದವರೆಗೆ ಪರಿಹಾರ ನೀಡುತ್ತದೆ.
ಮೆಶಿನ್ ವಿಷನ್ ವ್ಯಾಪಕವಾಗಿ ಬಳಸಲ್ಪಡುತ್ತದೆ:
• ಉತ್ಪನ್ನ ಗುರುತಿಸುವುದು
• ಲೇಬಲ್ ಪರಿಶೀಲನೆ
• PCB ದೋಷ ಪತ್ತೆ
• ಪ್ಯಾಕೇಜಿಂಗ್ ಪರಿಶೀಲನೆ
• ಆಟೋಮೋಟಿವ್ ಘಟಕದ ಪರಿಶೀಲನೆ
• ಸೆಮಿಕಂಡಕ್ಟರ್ ಪರಿಶೀಲನೆ
• ಆಹಾರ ಉತ್ಪಾದನಾ ನಿರೀಕ್ಷಣೆ
ಉತ್ಪನ್ನವನ್ನು ಗುರುತಿಸಲು, ವ್ಯವಸ್ಥೆ ಬರೋಡೆಗಳು, QR ಕೋಡ್ಗಳು, ಸೀರಿಯಲ್ ಸಂಖ್ಯೆಗಳು ಮತ್ತು ಮುದ್ರಿತ ಹಕ್ಕುಗಳನ್ನು ಓದುವ ಮೂಲಕ ಉತ್ಪನ್ನ ಮಾಹಿತಿ ದೃಢೀಕರಿಸುತ್ತದೆ. ಲೇಬಲ್ ಪರಿಶೀಲನೆಯಾಗಿರುವ ವೇಳೆಯಲ್ಲಿ, ಕ್ಯಾಮೆರಾಗಳು ಲೇಬಲ್ಗಳು ಇವೆ ಎಂದು, ಸರಿಯಾಗಿ ಸ್ಥಾಪಿತವಾಗಿದೆ ಎಂದು ಮತ್ತು ಸರಿಯಾಗಿ ಮುದ್ರಿಸಲಾಗಿದೆ ಎಂದು ಪರಿಶೀಲಿಸುತ್ತವೆ.
ಮುದ್ರಿತ ಸರ್ಕ್ಯೂಟ್ ಬೋರ್ಡ್ (PCB) ಉತ್ಪಾದನೆಯಲ್ಲಿ, ಮೆಶಿನ್ ವಿಷನ್ ಉಗಮ ಜೋಡಣೆಗಳನ್ನು, ಘಟಕದ ಸ್ಥಳವನ್ನು, ಚಾಲಕ ತ್ರೇಗಳನ್ನು ಮತ್ತು ಸಂಘಟಿತ ಖಚಿತವನ್ನು ಪರಿಶೀಲಿಸುತ್ತವೆ. ಕೈಗಾರಿಕ ಪರಿಶೀಲನೆಯೊಂದಿಗೆ ಗುರುತಿಸುವುದು ಕಷ್ಟವಾದ ಸಣ್ಣ ದೋಷಗಳನ್ನು ನೆರಳಾಗಿ ಹೆಚ್ಚು ಶೀಘ್ರವಾಗಿ ಭಾರತದ ಚಿತ್ರ ವಿಶ್ಲೇಷಣೆಯ ಮೂಲಕ ಸೇರಿಸಿಕೊಳ್ಳಬಹುದು.
ಪ್ಯಾಕೇಜಿಂಗ್ ಅನ್ವಯಗಳು ಮೆಶಿನ್ ವಿಷನ್ ಅನ್ನು ಪ್ಯಾಕೇಜ್ ಸಂಪೂರ್ಣತೆ, ಉತ್ಪನ್ನ ಗಣನೆಗಳನ್ನು ದೃಢೀಕರಿಸಲು, ಕೀಲಕಗಳನ್ನು ಪರಿಶೀಲಿಸಲು, ಭರ್ತಿಯ ಮಟ್ಟವನ್ನು ಪರಿಶೀಲಿಸಲು ಮತ್ತು ಪ್ಯಾಕೇಜಿಂಗ್ ಮಾಹಿತಿಯ ಶುದ್ಧತೆ ಖಚಿತಪಡಿಸಲು ಬಳಸಲು ಬಳಸುತ್ತವೆ. ಆಟೋಮೋಟಿವ್ ಮತ್ತು ಸೆಮಿಕಂಡಕ್ಟರ್ ಉತ್ಪಾದನೆಯಲ್ಲಿ, ಮೆಶಿನ್ ವಿಷನ್ ಹೆಚ್ಚು ಖಚಿತವಾದ ಆಯ್ತಿರುವ ಪ್ರಮಾಣವನ್ನು ಮತ್ತು ದೋಷಗಳನ್ನು ಪರಿಶೀಲಿಸುವ ಕೆಲಸಗಳನ್ನು ನಿರ್ವಹಿಸುತ್ತವೆ.
ಆಹಾರ ಉತ್ಪಾದನಾ ಪರಿಸರಗಳಲ್ಲಿ, ದೃಶ್ಯ ಸೆನ್ಸರ್ಗಳು ಉತ್ಪನ್ನವು ಕಾಣಿಸುವುದನ್ನು, ಬಣ್ಣವು ಶ್ರೇಣಾಲಿಕೆಯನ್ನು, ಗಾತ್ರ, ರೂಪ ಮತ್ತು ಪ್ಯಾಕೇಜಿಂಗ್ ಗುಣವನ್ನು ಪರಿಸರದಲ್ಲಿ ಬೆಂಬಲಿಸುತ್ತವೆ.
ಈ ಸಾಮರ್ಥ್ಯಗಳು ಗುಣಮಟ್ಟದ ನಿಯಂತ್ರಣ, ಉತ್ಪಾದನಾ ದಕ್ಷತೆ, traceability, ಪ್ರಕ್ರಿಯೆಯ ಶ్రೇಣಾಲಿಕೆ ಮತ್ತು ಉತ್ಪಾದನಾ ಫಲಾನುಭವವನ್ನು ಸುಧಾರಿಸಲು ಸಹಾಯ ಮಾಡುತ್ತವೆ.
ಖನಿಜ ಅನುಷ್ಠಾನ
ಖನಿಜ ಅನುಷ್ಠಾನ ಮತ್ತು ಉಲ್ಬಣ ನ監ಣೆಯಲ್ಲಿ ಯಂತ್ರ ದೃಷ್ಟಿಯು ಬಳಸಲಾಗುತ್ತದೆ, ಅಲ್ಲಿ ದೃಶ್ಯ ಮಾಹಿತಿಯು ವಿಶೇಷ ಕಾರ್ಯಕ್ಷಮತೆ ಕುರಿತ ಅಮೂಲ್ಯ ಒಳನೋಟವನ್ನು ನೀಡುತ್ತದೆ.
ಉಲ್ಬಣ ವ್ಯವಸ್ಥೆಗಳಲ್ಲಿ, ಬಬಲ್ಗಳು ಖನಿಜ ಪ್ರತ್ಯೇಕ tankನ ಮೇಲ್ಮಟ್ಟದಲ್ಲಿ ನಿರ್ಮಿತವಾಗುತ್ತವೆ. ಈ ಬಬಲ್ಗಳ ಗಾತ್ರ, ಆಕೃತಿ, ಬಣ್ಣ, ಅನೇಕತೆ ಮತ್ತು ಚಲನೆ ವ್ಯಾಪಕವಾಗಿ ಪ್ರತ್ಯೇಕ ಉತ್ತಮತೆಯನ್ನು ಪ್ರತ್ಯೇಕ ಪ್ರಕ್ರಿಯೆಯ ಪ್ರತಿಬಿಂಬವಾಗುತ್ತದೆ.
ಕ್ಯಾಮೆರಾಗಳು ನಿರಂತರವಾಗಿ ಉಲ್ಬಣ ಮೇಲ್ಮಟ್ಟದ ಚಿತ್ರಗಳನ್ನು ಹಿಡಿಸುತ್ತವೆ ಮತ್ತು ಚಿತ್ರದ ಪ್ರಕ್ರಿಯೆ ಕಾರ್ಯ ಕ್ರಮವು ಬಬಲ್ ಆದ್ಯಸ್ಥಾನಗಳನ್ನು ವಿಶ್ಲೇಷಿಸುತ್ತದೆ. ಸಂಗ್ರಹಿತ ಡೇಟಾ ಕಾರ್ಯನಿರ್ವಹಕರಿಗೆ ಪ್ರಕ್ರಿಯೆಯ ಸ್ಥಿತಿಗಳನ್ನು ಮೌಲ್ಯಮಾಪನ ಮಾಡಲು ಮತ್ತು ಸರಿಹೊಂದಿಸುವಿಕೆಗಳು ಅಗತ್ಯವೆಂದು ನಿರ್ಧರಿಸಲು ಸಹಾಯಮಾಡುತ್ತದೆ.
ಬಬಲ್ ರಚನೆ, ಬಣ್ಣ ವಿತರಣಾ, ಮೇಲ್ಮಟ್ಟ ಪಠ್ಯದ ಮತ್ತು ಚಲನೆಯ ಮಾದರಿಗಳನ್ನು ನ監ಣಿಸಲು, ಯಂತ್ರ ದೃಷ್ಟಿ ವ್ಯವಸ್ಥೆಗಳು ಉತ್ತಮ ಪ್ರಕ್ರಿಯೆ ನಿಯಂತ್ರಣವನ್ನು ಬೆಂಬಲಿಸುತ್ತವೆ, ಖನಿಜ ಮರುಪಡೆಯುವ ಪ್ರಮಾಣವನ್ನು ಉತ್ತಮಗೊಳಿಸುತ್ತವೆ ಮತ್ತು ಕಾರ್ಯಕ್ಷಮತೆಯನ್ನು ಹೆಚ್ಚಿಸುತ್ತವೆ.
ಸಾರಿಗೆ ಮತ್ತು ಭದ್ರತೆ
ಯಂತ್ರ ದೃಷ್ಟಿಯು ಆಧುನಿಕ ಸಾರಿಗೆ ಮತ್ತು ಭದ್ರತಾ ವ್ಯವಸ್ಥೆಗಳಲ್ಲಿ ಮಹತ್ವಪೂರ್ಣ ಅನುಬಂಧವನ್ನು ನಿರ್ವಹಿಸುತ್ತದೆ.
ಬುದ್ಧಿವಂತ ಸಾರಿಗೆ ವ್ಯವಸ್ಥೆಗಳಲ್ಲಿ (ITS), ಕ್ಯಾಮೆರಾಗಳು ನಿರಂತರವಾಗಿ ರಸ್ತೆಗಳನ್ನು, ಚಕ್ರತರಣಗಳನ್ನು, ತೆರಿಗೆ ಕೇಂದ್ರಗಳನ್ನು ಮತ್ತು ವಾಹನ ಮಾರ್ಗಗಳನ್ನು ಮೇಲ್ವಿಚಾರಣೆ ಮಾಡುತ್ತವೆ. ಹಿಡಿದ ಚಿತ್ರಗಳನ್ನು ವಾಹನಗಳನ್ನು ಗುರುತಿಸಲು, ರಸ್ತೆ ಚಲನೆಯ ಪ್ರಮಾಣವನ್ನು ಟೋಳಿ ಮಾಡಲು, ಮಾರ್ಗ ಉಲ್ಲಂಘನೆಗಳನ್ನು ಪತ್ತೆಹಚ್ಚಲು, ಲೈಸೆನ್ಸ್ ತಕ್ಷಣಗಳಿಗೆ ಗುರುತಿಸಲು ಮತ್ತು ರಸ್ತೆ ಸ್ಥಿತಿಗಳನ್ನು ನ監ಣಿಸಲು ನAnalyzed.
ಭದ್ರತಾ ಮತ್ತು ಮೇಲ್ವಿಚಾರಣಾ ವ್ಯವಸ್ಥೆಗಳಲ್ಲಿ ದೃಶ್ಯ ನಿರೀಕ್ಷಣಾ ತಂತ್ರಜ್ಞಾನವು ವ್ಯಾಪಕವಾಗಿ ಬಳಸಲಾಗಿದೆ. ಕ್ಯಾಮೆರಾಗಳು ರಕ್ಷಿತ ಪ್ರದೇಶಗಳನ್ನು ನ監ಣಿಸುತ್ತವೆ ಮತ್ತು ಪ್ರವೇಶ ನಿಯಂತ್ರಣ, ಪರಿಧಿ ನ監ಣಾ, ವಸ್ತು ಪತ್ತೆ, ಮತ್ತು ಘಟನೆ ಪತ್ತೆ ಎನ್ನುವ ಕಾರ್ಯಾಚರಣೆಗಳಿಗೆ ಚಿತ್ರ ಡೇಟಾವನ್ನು ಒದಗಿಸುತ್ತವೆ.
ದೊಡ್ಡ ಪ್ರಮಾಣದ ದೃಶ್ಯ ಮಾಹಿತಿಯನ್ನು ಸ್ವಯಂಚಾಲಿತವಾಗಿ ಪ್ರಕ್ರಿಯೆ ಮಾಡುವ ಮೂಲಕ, ಯಂತ್ರ ದೃಷ್ಟಿಯು ಕಾರ್ಯಾತ್ಮಕ ಕಾರ್ಯಕ್ಷಮತೆಯನ್ನು ಸುಧಾರಿಸುತ್ತದೆ ಮತ್ತು ಬದಲಾವಣೆಯ ಯಶಸ್ಸಿಗೆ ವೇಗವಾಗಿ ಪ್ರತಿಸ್ಪಂದನಗಳನ್ನು ಬೆಂಬಲಿಸುತ್ತದೆ.
ವೈದ್ಯಕೀಯ ಚಿತ್ರಣ
ವೈದ್ಯಕೀಯ ಚಿತ್ರಣವು ಯಂತ್ರ ದೃಷ್ಟಿ ತಂತ್ರಜ್ಞಾನದ ಮತ್ತೊಂದು ಮುಖ್ಯ ಅನ್ವಯ ಕ್ಷೇತ್ರವಾಗಿದೆ.
ಆಧುನಿಕ ಆರೋಗ್ಯದ ತಂತ್ರಗಳು ಹೆಚ್ಚಿನ ಸಂಖ್ಯೆಯ ವೈದ್ಯಕೀಯ ಚಿತ್ರಗಳನ್ನು ಉತ್ಪಾದಿಸುತ್ತವೆ, ಇದು ಕನಿಷ್ಠ ವಿಶ್ಲೇಷಣೆಯನ್ನು ಅಗತ್ಯವಿದೆ. ಯಂತ್ರ ದೃಷ್ಟಿ ವೈದ್ಯಕೀಯ ವೃತ್ತಿಜೀವಿಗಳಿಗೆ ಚಿತ್ರಗಳನ್ನು ಸುಧಾರಿಸಲು, ಪ್ರಮುಖ ರಚನೆಗಳನ್ನು ಗುರುತಿಸಲು ಮತ್ತು ತದನಂತರ ಮೌಲ್ಯಮಾಪನಗಳಿಗೆ ಬೆಂಬಲಿಸಲು ಸಹಾಯಿಸುತ್ತದೆ.
ಯಂತ್ರ ದೃಷ್ಟಿ ತಂತ್ರಜ್ಞಾನಗಳಾದ
• X-ray ಚಿತ್ರಗಳು
• ಮಾಗ್ನೆಟಿಕ್ ರೆಸೊನೇಣ್ಸ್ ಇಮೇಜಿಂಗ್ (MRI) ಸ್ಕ್ಯಾನ್ಗಳು
• ಗಣಕ ಟೋಮೋಗ್ರಫಿ (CT) ಚಿತ್ರಗಳು
ವಿಶ್ಲೇಷಣಾ ಪ್ರಕ್ರಿಯೆಯು ಸಾಮಾನ್ಯವಾಗಿ ಶರೀರದ ರಚನೆಗಳನ್ನು ಪತ್ತೆಹಚ್ಚುವುದು, ಆಯಾಮಗಳನ್ನು ಭದ್ರಪಡಿಸುವುದು, ಅಸಾಮಾನ್ಯತೆಗಳನ್ನು ಮೇಲ್ಮಾಡುವುದು ಮತ್ತು ಚಿತ್ರಗಳ ಲಕ್ಷಣಗಳನ್ನು ಬಳಸಿಕೊಂಡು ವೈದ್ಯಕೀಯ ಮಾದರಿಗಳೊಂದಿಗೆ ಹೋಲಿಸುವುದು ಸೇರಿದೆ. ಈ ಸಾಧನಗಳು ಚಿತ್ರ ಅನುವಾದ ವಿನ್ಯಾಸವನ್ನು ಉತ್ತಮಗೊಳಿಸಲು ಮತ್ತು ಹೆಚ್ಚು ಖಚಿತವಾದ ಕ್ಲಿನಿಕೆಯ ಅಂದಾಜುಗಳಿಗೆ ಬೆಂಬಲಿಸಲು ಸಹಾಯಕವಾಗುತ್ತವೆ.
ವೈದ್ಯಕೀಯ ಚಿತ್ರಣ ತಂತ್ರಜ್ಞಾನದ ಮುಂದುವರಿದಂತೆ, ಯಂತ್ರ ದೃಷ್ಟಿ ತಾಂತ್ರಿಕ ಬೆಂಬಲದಲ್ಲಿ, ಚಿಕಿತ್ಸೆ ಯೋಜನೆಯಲ್ಲಿಯೂ ಮತ್ತು ಆರೋಗ್ಯ ಸಂಶೋಧನೆಯಲ್ಲಿ ಹೆಚ್ಚಾಗಿ ಮಹತ್ವವಾಗುತ್ತಿದೆ.
ವೈಜ್ಞಾನಿಕ ಸಂಶೋಧನೆ
ವೈಜ್ಞಾನಿಕ ಸಂಶೋಧನೆಯು ಸಾಮಾನ್ಯವಾಗಿ ಅತ್ಯಂತ ಸಣ್ಣ, ಹೆಚ್ಚು ಸಂಖ್ಯೆಯಲ್ಲಿ ಅಥವಾ ಬಹಳ ಸಂಕೀರ್ಣವಾಗಿರುವ ವಸ್ತುಗಳ ಪರಿಗಣನೆ ಮತ್ತು ವಿಶ್ಲೇಷಣೆಯ ಅಗತ್ಯವನ್ನು ಹೊಂದಿದೆ, ಇದನ್ನು ಕೈಗಾರಿಕಾ ವಿಧಾನಗಳಿಗೆ ಸೂಕ್ತವಾಗಿ ಮೌಲ್ಯಮಾಪನ ಮಾಡುವುದು ಕಷ್ಟಕರವಾಗಿದೆ. ಯಂತ್ರ ದೃಷ್ಟಿ ಸಂಶೋಧಕರಿಗೆ ಚಿತ್ರಾಧಿಕಾರ, ಪ್ರಮಾಣ, ಮತ್ತು ವರ್ಗೀಕರಣಕ್ಕೆ ಸ್ವಯಂಚಾಲಿತ ಸಾಧನಗಳನ್ನು ಒದಗಿಸುತ್ತದೆ.
ಅನ್ವಯಗಳು ಸೇರಿಸುತ್ತವೆ:
• ವಸ್ತು ವಿಶ್ಲೇಷಣೆ
• ಜೀವ ವಿಜ್ಞಾನ ವಿಶ್ಲೇಷಣೆ
• ರಾಸಾಯನಿಕ ವಿಶ್ಲೇಷಣೆ
• ಜೀವನ ವಿಜ್ಞಾನ ಸಂಶೋಧನೆ
• ರಕ್ತಕೋಶಗಳು ಎಣಿಸುವುದು ಮತ್ತು ವರ್ಗೀಕರಣ
• ಕ್ರೋಮೋಸೋಮ್ ವಿಶ್ವೆಕ್ಷಣೆ
• ಕ್ಯಾನ್ಸರ್ ಕ提升ಗೊಂಡ ಕೋಶಗಳ ಗುರುತಿಸುವಿಕೆ
ಜೀವಾಸಾಗರ ವಲಯದಲ್ಲಿ ಯಂತ್ರ ದೃಷ್ಟಿ ವ್ಯವಸ್ಥೆಗಳು ಮೈಕ್ರೋಸ್ಕೋಪಿಕ್ ಚಿತ್ರಗಳನ್ನು ಹಿಡಿಕು ಮತ್ತು ವಿಶೇಷ ಕೋಶ ಆಕೃತಿಗಳನ್ನು ಸ್ವಯಂಚಾಲಿತವಾಗಿ ಗುರುತಿಸಬಲ್ಲವು. ರಕ್ತ ವಿಶ್ಲೇಷಣೆಯ ಸಂದರ್ಭದಲ್ಲಿ, ವ್ಯವಸ್ಥೆ ಕೋಶಗಳನ್ನು ಎಣಿಸಲು, ಕೋಶ ಲಕ್ಷಣಗಳನ್ನು ಅಳಕು ಮಾಡುವಲ್ಲಿ, ಮತ್ತು ವಿಭಿನ್ನ ಕೋಶ ವರ್ಗಗಳನ್ನು ವರ್ಗೀಕರಿಸಲು ಅನುವೇದನೀಯವಾಗುತ್ತದೆ. ಜೀವ ವೈಜ್ಞಾನಿಕ ಮತ್ತು ವೈದ್ಯಕೀಯ ಸಂಶೋಧನದಲ್ಲಿ, ಚಿತ್ರ ಪ್ರಕ್ರಿಯೆ ತಂತ್ರಗಳು ಕ್ರೋಮೋಸೋಮ್ ವಿಶ್ಲೇಷಣೆಗೆ ಮತ್ತು ಅಸಾಮಾನ್ಯ ಕೋಶದ ಶ್ರೇಣಿಯನ್ನು ಗುರುತಿಸಲು ಸಹಾಯ ಮಾಡುತ್ತವೆ.
ಸಂಶೋಧಕರು ಬದಲಿ ಸಾಮಗ್ರಿಯ ಮೇಲ್ಮಟ್ಟಗಳನ್ನು ವಿಶ್ಲೇಷಿಸಲು, ರಾಸಾಯನಿಕ ಪ್ರತಿಕ್ರಿಯೆಗಳನ್ನು ನೋಂದಾಯಿಸಲು, ಮತ್ತು ಪ್ರಯೋಗಗಳಿಂದ ಪ್ರಮಾಣಾತ್ಮಕ ಡೇಟಾವನ್ನು ಸಂಗ್ರಹಿಸಲು ಯಂತ್ರ ದೃಷ್ಟಿಯನ್ನು ಬಳಸುತ್ತಾರೆ. ಸ್ವಯಂಚಾಲಿತ ಚಿತ್ರ ವಿಶ್ಲೇಷಣೆ ಅಳತೆಯ ಶ್ರೇಣಿಯ ಸಮಾನಾಂತರವನ್ನು ಸುಧಾರಿಸುತ್ತದೆ ಮತ್ತು ದೊಡ್ಡ ಡೇಟಾಸೆಟ್ಗಳನ್ನು ಹೆಚ್ಚು ಪರಿಣಾಮಕಾರಿ ರೀತಿಯಿಂದ ಪ್ರಕ್ರಿಯೆಗೊಳಿಸಲು ಪರಿಗಣಿಸುತ್ತವೆ.
ಬಹುಉದ್ದೇಶಗಳಲ್ಲಿ ಲಾಭಗಳು
ಯಂತ್ರ ದೃಷ್ಟಿಯ ಅನ್ವಯಗಳ ವ್ಯಾಪಕ ಶ್ರೇಣಿಯು ಕೈಗಾರಿಕಾ ಮತ್ತು ಅಹಿತಕರ ವಾತಾವರಣಗಳ ನಡುವೆ ಅದ್ದೂರಿಯಲ್ಲಿದೆ ಎಂದು ತೋರಿಸುತ್ತವೆ.
ಚಿತ್ರ ಪಡೆಯುವಿಕೆ, ಸ್ವಯಂಚಾಲಿತ ವಿಶ್ಲೇಷಣೆ, ಪ್ರಮಾಣ, ಮಾದರಿಯ ಗುರುತಿಸುವಿಕೆ ಮತ್ತು ನಿರ್ಧಾರಗಳ ಕಾರ್ಯಗಳನ್ನು ಎಣಿಸುವ ಮೂಲಕ, ಯಂತ್ರ ದೃಷ್ಟಿ ವ್ಯವಸ್ಥೆಗಳು ದೃಶ್ಯ ಮಾಹಿತಿಯನ್ನು ಕಾರ್ಯಶೀಲ ಡೇಟಾದ ಮೇಲೆ ಪರಿವರ್ತಿಸುತ್ತವೆ. ಈ ಸಾಮರ್ಥ್ಯ ಹೆಚ್ಚು ಪರಿಣಾಮಕಾರಿ ಪರಿಶೀಲನೆ, ನ監ಣಾ, ಮತ್ತು ನಿಯಂತ್ರಣ ಪ್ರಕ್ರಿಯೆಗಳನ್ನು ಬೆಂಬಲಿಸುತ್ತದೆ.
ಕೃಷಿ, ಉತ್ಪಾದನೆ, ಖನಿಜ ಅನುಷ್ಠಾನ, ಸಾರಿಗೆ, ಭದ್ರತೆ, ಆರೋಗ್ಯ, ಅಥವಾ ವೈಜ್ಞಾನಿಕ ಸಂಶೋಧನೆಗಳಲ್ಲಿ ಬಳಸುವಾಗ, ಯಂತ್ರ ದೃಷ್ಟಿಯು ಶುದ್ಧತೆ, ಕಾರ್ಯಕ್ಷಮತೆ, ಸಮಾನಾಂತರ, ಉತ್ಪಾದಕತೆ, ಮತ್ತು ನಿರ್ಧಾರಗಳ ಗುಣವನ್ನು ಉತ್ತೇಜಿಸುತ್ತದೆ. ಈ ಪ್ರಯೋಜಕರು ಯಂತ್ರ ದೃಷ್ಟಿ ಮತ್ತು ದೃಶ್ಯ ಸೆನ್ಸರ್ಗಳನ್ನು ಆಧುನಿಕ ಸ್ವಯಂಚಾಲಿತ ಮತ್ತು ಬುದ್ಧಿವಂತ ವ್ಯವಸ್ಥೆಗಳ ಮೂಲ ತಂತ್ರಜ್ಞಾನಗಳಾಗಿ ಮಾಡಿದ್ದು.
ದೃಶ್ಯ ಸೆನ್ಸರ್ಗಳ ಅಭಿವೃದ್ಧಿ ವರ್ಣನೆ ಮತ್ತು ಪರಿವರ್ತನೆ
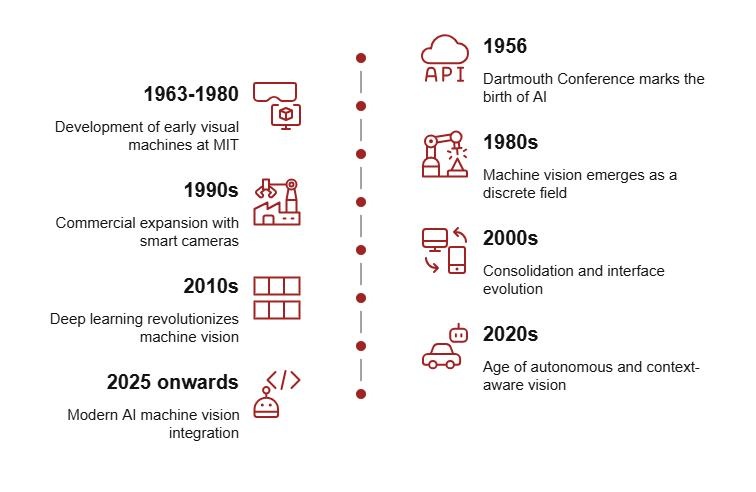
ದೃಶ್ಯ ಸೆನ್ಸರ್ ತಂತ್ರಜ್ಞಾನಗಳ ಅಧ್ಯಾಯನ ಆರಂಭಿಕ ಅಭಿವೃದ್ಧಿ
ದೃಷ್ಟಿಶಕ್ತಿಯ ಸಂವೇದಿ ತಂತ್ರಜ್ಞಾನ 1950ರ ಉದಯಭಾಗದಲ್ಲಿ ಇಲೆಕ್ಟ್ರಾನಿಕ್ಗಳು, ಇಮೇಜಿಂಗ್ ಸಾಧನಗಳು ಮತ್ತು ಕಂಪ್ಯೂಟರ್ ವಿನ್ಯಾಸಗಳಲ್ಲಿ ಹೆಚ್ಚಿನ ಉತ್ತರಣೆಗಳೊಂದಿಗೆ ಚಾಲನೆಯಲ್ಲಿತ್ತು, ಇದರಿಂದ ಸ್ವಯಂಚಾಲಿತ ಪರಿಶೀಲನೆ ಮತ್ತು ಯಂತ್ರ ದೃಷ್ಟಿಗೆ ಹೊಸ ಸಾಧ್ಯತೆಗಳು ಉಂಟಾಗುತ್ತವೆ. ಗೆದ್ಲಕರು ಯಂತ್ರಗಳು ತನ್ನ ಪರಿಸರದಲ್ಲಿ ದೃಷ್ಟಿಕೋನ ಮಾಹಿತಿಯನ್ನು ಸಂಗ್ರಹಿಸಲು ಮತ್ತು ಆ ಮಾಹಿತಿಯನ್ನು ಸ್ವಯಂಚಾಲಿತ ಕಾರ್ಯಗಳನ್ನು ಬೆಂಬಲಿಸಲು ಬಳಸಲು ಅನುಮತಿಸುವ ವಿಧಾನಗಳನ್ನು ಹುಡುಕಿದರು.
ಮೊದಲ ದೃಷ್ಟಿಶಕ್ತಿಯ ವ್ಯವಸ್ಥೆಗಳು ಸಾಪೇಕ್ಷವಾಗಿ ಸುಲಭವಾಗಿದ್ದು, ಲಭ್ಯವಿರುವ ಕ್ಯಾಮೆರಾಗಳ, ಉತ್ಪಾದನೀಯ ಹಾರ್ಡ್ವೇರ್ ಮತ್ತು ಸಂಗ್ರಹಣೆ ಸಾಧನಗಳ ಸಾಮರ್ಥ್ಯಗಳಿಂದ ನಿರ್ಬಂಧಿತವಾಗಿದ್ದವು. ಚಿತ್ರ ಸಂಗ್ರಹಣೆ ನಿಧಾನವಾಗಿ ನಡೆಯಿತು, ಗಣಕ ಸಂಪತ್ತು ಕಡಿಮೆ ಆಗಿದ್ದವು, ಅಂದರೆ ಕೇವಲ ಬೇಸಿಕ್ ಇಮೇಜ್ ವಿಶ್ಲೇಷಣಾ ಕಾರ್ಯಗಳನ್ನು ಮಾತ್ರ ನಿರ್ವಹಿಸಲಾಗುತ್ತಿತ್ತು. ಈ ನಿರ್ಬಂಧಗಳ ನಂತರವೂ, ಈ ಮೊದಲ ಅಭಿವೃದ್ಧಿಗಳು ಆಧುನಿಕ ಯಂತ್ರ ದೃಷ್ಟಿಯ ತಂತ್ರಜ್ಞಾನದ ನೆಲೆಯೊಂದಿಗೆ ಸ್ಥಾಪಿತವಾಗುತ್ತವೆ.
ಕಂಪ್ಯೂಟರ್ಗಳು ಹೆಚ್ಚು ಶಕ್ತಿ ಪಡೆದುಕೊಂಡಂತೆ ಮತ್ತು ಇಮೇಜ್ ಸೆನ್ಸರ್ ತಂತ್ರಜ್ಞಾನ ಉತ್ತಮಗೊಂಡು, ದೃಷ್ಟಿಶಕ್ತಿಯ ಸೆನ್ಸರ್ಗಳು ಪ್ರಯೋಗಾಲಯದ ಅದ್ಯಯನ ಯೋಜನೆಗಳಿಂದ ಕೈಗಾರಿಕಾ ಉಪಕರಣಗಳಿಗೆ ಹಿಂದಿನಿಂದ ಮಾರ್ಪಟ್ಟವು.
ರೊಬೋಟ್ ದೃಷ್ಟಿ ಸಂಶೋಧನೆಯ ಉದಯ
1960ರ ದಶಕದಲ್ಲಿ, ಯಂತ್ರಗಳ ಒಳಗೆ ಪರಿಸರದಲ್ಲಿ ಅತ್ಮೀಯಕ್ಕೆ ಮತ್ತು ಪ್ರತಿಷ್ಟಾಪಿತವಾದ ವಸ್ತುಗಳನ್ನು ಗುರುತಿಸುವಂತೆ ಮಾಡಲು ರೊಬೋಟ್ ದೃಷ್ಟಿಯನ್ನು ಕೇಂದ್ರಗೊಳಿಸುವ ಸಂಶೋಧನಾ ಪ್ರಯತ್ನಗಳು ವಿಸ್ತಾರಗೊಳ್ಳುತ್ತವೆ. ಮೊದಲ ಅಧ್ಯಯನಗಳನ್ನು ಸಾಮಾನ್ಯವಾಗಿ ಸುಲಭ ರೂಪರೇಖೆಗಳ ಮತ್ತು ನಿಖರ ಸ್ಥಳಗಳನ್ನು ಒಳಗೊಂಡ ನಿಯಂತ್ರಿತ ಒಳಾಂಗಣ ಸೆಟ್ಟಿಂಗ್ಗಳನ್ನು ಒಳಗೊಂಡವು.
ಸುಳಿವು ಪಡೆಯಲು, ಜ್ಯಾಮಿತೀಯ ರೂಪಗಳನ್ನು ಗುರುತಿಸಲು, ಹಿನ್ನೆಲೆಯಿಂದ ವಸ್ತುಗಳನ್ನು ಪ್ರತ್ಯೇಕಿಸಲು ಮತ್ತು ಇಮೇಜ್ಗಳಲ್ಲಿ ವಸ್ತುಗಳ ಸ್ಥಾನಗಳನ್ನು ನಿರ್ಧರಿಸಲು ಶೋಧಕರು ತಂತ್ರಗಳನ್ನು ಅಭಿವೃದ್ಧಿಪಡಿಸಿದರು. ಈ ವಿಚಾರಣೆಗಳು ಇಮೇಜ್ ಸೆಗ್ಮೆಂಟೇಶನ್, ವೈಶಿಷ್ಟ್ಯಗಳ ನಿರೀಕ್ಷಣೆ, ವಸ್ತು ಗುರುತಿಸುವಿಕೆ ಮತ್ತು ಮಾದರಿ ವಿಶ್ಲೇಷಣೆ ಮುಂತಾದ ಆಧುನಿಕ ಯಂತ್ರ ದೃಷ್ಟಿಯ ಆಧಾರ ಮತ್ತು ನೆಲೆಗಳನ್ನು ಪರಿಚಯಿಸಿತು.
ಗಣಕ ಹಾಕುವ ನಿರ್ಬಂಧಗಳು ವ್ಯವಸ್ಥೆಯ ಸಾಮರ್ಥ್ಯಗಳನ್ನು ಇಳಿಸುತ್ತಿರುವಾಗ, ಈ ಸಮಯದಲ್ಲಿ ಯಂತ್ರಾಧಾರಿತ ದೃಷ್ಟಿಯ ಅಧ್ಯಯನವು ಉದಯಗೊಂಡಿತು ಮತ್ತು ಭವಿಷ್ಯದ ಸ್ವಯಂಚಾಲಿತ ತಂತ್ರಜ್ಞಾನಗಳಿಗೆ ನೆಲೆಯಲ್ಲಿ ಒದಗಿಸುತ್ತದೆ.
ಕೈಗಾರಿಕಾ ಅಪ್ಲಿಕೇಶನ್ಗಳಿಗೆ ವಿಸ್ತರಣೆ
1970ರ ದಶಕವು, ಇಲೆಕ್ಟ್ರಾನಿಕ್ಗಳು ಮತ್ತು ಗಣಕತಂತ್ರದಲ್ಲಿ ಸುಧಾರಣೆಗಳಿಗೆ, ದೃಷ್ಟಿವೈಶಿಷ್ಟ್ಯಗಳನ್ನು ಕೈಗಾರಿಕೆಯಲ್ಲಿ ಹೆಚ್ಚು ಉಪಯುಕ್ತವಾಗಿದೆ. ನಿದರ್ಶನ ಮತ್ತು ಅಳತೆಯ ಕಾರ್ಯಗಳಿಗೆ ಯಂತ್ರ ದೃಷ್ಟಿ ವ್ಯವಸ್ಥೆಗಳನ್ನು ಸ್ವೀಕರಿಸಲು ತಯಾರಕರು ಪ್ರಾರಂಭಿಸಿದರು, ಇದು ಪುನರಾವೃತ್ತ, ಶ್ರಮ-ಆಧಾರಿತ ಅಥವಾ ಕೈಯಾದಕ ಪರಿಶೀಲನೆಯಾದರೂ ನಿರ್ವಹಿಸಲು ಕಷ್ಟಪಡುವುದಿಲ್ಲ.
ಮೊದಲು ಕೈಗಾರಿಕ ಅನ್ವಯಗಳಲ್ಲಿ ಕೆಲವು:
• ಏಕೀಕೃತ ವಲಯ ಉತ್ಪಾದನೆ
• ತೀಕ್ಷ್ಣ ಇಲೆಕ್ಟ್ರಾನಿಕ್ ಅಸೆಂಬ್ಲಿ
• ಪಾನೀಯ ಪ್ಯಾಕೇಜಿಂಗ್ ಪರಿಶೀಲನೆ
• ಸ್ವಚ್ಛ ದ್ರವ್ಯ ನಿಯಂತ್ರಣ ವ್ಯವಸ್ಥೆಗಳು
ಅಲೆ ರೂಪಾಂತರದಲ್ಲಿ, ದೃಷ್ಟಿಸಂಭ್ರಮವು ಸೂಕ್ಷ್ಮ ಸರ್ಕ್ಯೂಟ್ ದೇಶಾಂಕಗಳನ್ನು ಪರಿಶೀಲಿಸಲು ಮತ್ತು ಉತ್ಪಾದನಾ ದೋಷಗಳನ್ನು ಗುರುತು ಮಾಡುವ ಕಾರ್ಯದಲ್ಲಿತ್ತು. ಇಲೆಕ್ಟ್ರಾನಿಕ್ ಅಸೆಂಬ್ಲಿಯಿಂದ, ಅವು ಭಾಗಗಳ ಸ್ಥಳ ಮತ್ತು ಹಂಗಾಮಿ ದೃಢೀಕರಣವನ್ನು ಖಚಿತಪಡಿಸುತ್ತವೆ. ಪ್ಯಾಕೇಜಿಂಗ್ ವ್ಯವಸ್ಥೆಗಳು ಲೇಬಲ್ಗಳನ್ನು, ಭರ್ತಿಯ ಮಟ್ಟಗಳನ್ನು, ಮುಚ್ಚುವುದನ್ನು ಮತ್ತು ಪ್ಯಾಕೇಜ್ ಶ್ರೇಣಿಕೆಯನ್ನು ಪರಿಶೀಲಿಸಲು ಯಂತ್ರ ದೃಷ್ಟಿಯನ್ನು ಬಳಸುತ್ತವೆ. ಈ ಅಪ್ಲಿಕೇಶನ್ಗಳು ದೃಷ್ಟಿಶಕ್ತಿಯ ಸೆನ್ಸರ್ಗಳ ಗುಣಮಟ್ಟವನ್ನು ಸುಧಾರಿಸಲು ಮತ್ತು ಉತ್ಪಾದನಾ ಕಾರ್ಯಕ್ಷಮತೆಯನ್ನು ಸುಧಾರಿಸಲು ಸಾಧ್ಯತೆಯನ್ನು ತೋರಿಸುತ್ತವೆ.
ಅಭಿವೃದ್ಧಿಯಲ್ಲಿ ವೇಗ ನೀಡುವ ತಂತ್ರಜ್ಞಾನ ಸುಧಾರಣೆಗಳು
ದೃಷ್ಟಿಶಕ್ತಿಯ ಸೆನ್ಸರ್ಗಳ ಅಭಿವೃದ್ಧಿಯು ಹಲವು ವೈಜ್ಞಾನಿಕ ಮತ್ತು ಎಂಜಿನಿಯರಿಂಗ್ ಶ್ರೇಣಿಗಳಲ್ಲಿ ಪ progresso ಅನ್ನು ಹೆಚ್ಚಿಸಲಾಗಿದೆ.
ಡಿಜಿಟಲ್ ಇಮೇಜ್ ಪ್ರ processamento ಯ ಉತ್ಪಾದನೆಯ ಸುಧಾರಣೆಗಳು ಇಮೇಜ್ ಸುಧಾರಣೆ, ಶಬ್ದವನ್ನು ಕಡಿಮೆಗೊಳಿಸುವ ಮತ್ತು ವೈಶಿಷ್ಟ್ಯಗಳ ಶುದ್ಧೀಕರಣ ವಿಧಾನಗಳನ್ನು ಉತ್ತೇಜಿಸುತ್ತವೆ. ಮಾದರಿ ಗುರುತಿಸುವಲ್ಲಿ ಶೋಧನವು ವಸ್ತುಗಳು, ಚಿಹ್ನೆಗಳು ಮತ್ತು ಪುನರಾವೃತ್ತ ಕಾರ್ಯಕ್ರಮಗಳನ್ನು ಹೆಚ್ಚು ಖಚಿತವಾಗಿ ಗುರುತಿಸಲು ವ್ಯವಸ್ಥೆಗಳೊಡನೆ ಶ್ರೇಷ್ಠತೆ ಹೊಂದಿಸಿದವು. ಕಂಪ್ಯೂಟರ್ ಗ್ರಾಫಿಕ್ನಲ್ಲಿ ಸುಧಾರಣೆಗಳು ಉತ್ತಮ ಇಮೇಜ್ ಪ್ರತಿನಿಧಿಯ ಮತ್ತು ವಿಶ್ಲೇಷಣೆಗೆ ಬೆಂಬಲಿತವಾಗಿವೆ.
ಮಾನವ ದೃಷ್ಟಿ ಅಧ್ಯಯನಗಳೂ ಇಮೇಜ್ ವ್ಯಾಖ್ಯಾನ ವಿಧಾನಗಳನ್ನು ಪ್ರಭಾವಿತಗೊಳಿಸಲು ಸಹಾಯಕವಾಗಿದ್ದವು, ಏಕೆಂದರೆ ಮಕ್ಕಳ ಕಂಪ್ಯೂಟಿಂಗ್ ತಂತ್ರಜ್ಞಾನದ ಸುಧಾರಣೆಗಳು ವಸ್ತು ವರ್ಗೀಕರಣ, ಮಾದರಿ ಗುರುತಿಸುವಿಕೆ ಮತ್ತು ಸ್ವಾಯತ್ತ ನಿರ್ಧಾರ ನಿರ್ವಹಣಾ ಸಾಮರ್ಥ್ಯಗಳಲ್ಲಿ ಉತ್ತಮಪಡಿಸುತ್ತವೆ.
ಈ ಅಭಿವೃದ್ಧಿಗಳು ಯಂತ್ರ ದೃಷ್ಟಿಯ ವ್ಯವಸ್ಥೆಗಳನ್ನು ಸರಳ ಪರಿಶೀಲನೆಗಳ ಗಡುವಿನಿಂದ ಹೊರಗೆ ಹೋಗಲು ಹಾಗೂ ರೊಬೋಟ್ ಮಾರ್ಗದರ್ಶನ, ದೋಷ ವರ್ಗೀಕರಣ, ವಸ್ತುವಾಗಿ ಹಿಂಜರಿಯುವಿಕೆ, ಆಯಾಮ ಮಾಪನ ಮತ್ತು ಪ್ರಕ್ರಿಯೆ ನಿಯಂತ್ರಣ ಮುಂತಾದ ಹೆಚ್ಚು ಉತ್ತಮ ಕಾರ್ಯಗಳನ್ನು ನಿರ್ವಹಿಸಲು ಅನುಮತಿಸಿತು.
ಇಮೇಜಿಂಗ್ ಸಾಧನಗಳ ಏವನ
ದೃಷ್ಟಿಶಕ್ತಿಯ ಸೆನ್ಸರ್ಗಳ ಪ್ರಗತಿ ಇಮೇಜ್ ಸೆನ್ಸಿಂಗ್ ತಂತ್ರಜ್ಞಾನದ ಸುಧಾರಣೆಯೊಂದಿಗೆ ಹೆಚ್ಚು ಸಂಬಂಧಿಸಿದೆ.
ಮೊದಲ ಯಂತ್ರ ದೃಷ್ಟಿಯ ವ್ಯವಸ್ಥೆಗಳು ಇಮೇಜ್ ಸಂಗ್ರಹಣೆಗೆ ಕ್ಯಾಮೆರಾ ಟ್ಯೂಬ್ ತಂತ್ರಜ್ಞಾನವನ್ನು ದೃಢೀಕರಿಸುತ್ತವೆ. ಈ ಸಾಧನಗಳು ಮೂಲಭೂತ ದೃಷ್ಟಿ ಪರಿಶೀಲನೆ ಮಾಡಲು ಸಾಮರ್ಥ್ಯವನ್ನು ನೀಡಿದ ಆದರೂ, ಈವು ಸಾಮಾನ್ಯವಾಗಿ ಕಡಿಮೆ ಕ್ಯಾನ್ಸ್ ಗುಣಮಟ್ಟ, ಹೆಚ್ಚಿನ ಶ್ರೇಣಿಯ ಗಾತ್ರ, ಕಡಿಮೆ ಸ್ಥಿತಿಶೀಲತೆ ಮತ್ತು ಹೆಚ್ಚಾದ ನಿರ್ವಹಣಾ ಅಗತ್ಯಗಳಿಂದ ಸಮಸ್ಯೆಗಳನ್ನು ಎದುರಿಸುತ್ತವೆ.
CCD (ಚಾರ್ಜ್-ಕಪಲ್ಡ್ ಸಾಧನ) ಸೆನ್ಸರ್ಗಳ ಪರಿಚಯವು ಪ್ರಮುಖ ತಂತ್ರಜ್ಞಾನ ಬೃಹತ್ತರವನ್ನು ಪ್ರತಿನಿಧಿಸುತ್ತವೆ. CCD ಸೆನ್ಸರ್ಗಳು ಉತ್ತಮ ಇಮೇಜ್ ಗುಣಮಟ್ಟ, ಹೆಚ್ಚು ಕಿರೀಟ ಶ್ರೇಷ್ಟತನ, ಉತ್ತಮ ಭರವಸೆ, ಮತ್ತು ಹೆಚ್ಚು ಕಾನ್ಸಿಸ್ಟೆಂಟ್ ಕಾರ್ಯದಲ್ಲಿ ಪೂರೈಕೆ ಮಾಡುತ್ತವೆ. ಈ ಸರಿ-ಸೆವಾರ್ಷಣಗಳು ಯಂತ್ರ ದೃಷ್ಟಿಯ ವ್ಯವಸ್ಥೆಗಳ ಶುದ್ಧತೆ ಮತ್ತು ಕಾರ್ಯಕ್ಷಮತೆಯನ್ನು ಬಹುಮಟ್ಟಿಗೆ ಉತ್ತೇಜಿಸುತ್ತವೆ.
CCD ತಂತ್ರಜ್ಞಾನದ ಸ್ವೀಕಾರವು ವ್ಯಾಪಕ ಶ್ರೇಣಿಯ ಕೈಗಾರಿಕೆಗಳಲ್ಲಿ ಹೆಚ್ಚು ನಿಖರ ಪರಿಶೀಲನೆ, ಅಳತೆ ಮತ್ತು ಸ್ವಯಂಘಾತ ಸುಧಾರಣಾ ಅಪ್ಲಿಕೇಶನ್ಗಳನ್ನು ಅನುಮತಿಸುತ್ತದೆ.
ಆಧುನಿಕ ದೃಷ್ಟಿಶಕ್ತಿಯ ಸೆನ್ಸರ್ ತಂತ್ರಜ್ಞಾನ
ನೇಮಕಾತಿ ದೃಶ್ಯ ಸಮರ್ಥನೆಗಳು ಹಿಂದಿನ ವ್ಯವಸ್ಥೆಗಳಿಗಿಂತ ಹೆಚ್ಚು ಸಾಮರ್ಥ್ಯವನ್ನು ನೀಡುತ್ತವೆ. ಸೆನ್ಸರ್ ವಿನ್ಯಾಸ, ಪ್ರೊಸೆಸಿಂಗ್ ಹಾರ್ಡ್ವೇರ್, ಸಂಪರ್ಕ ತಂತ್ರಜ್ಞಾನಗಳು ಮತ್ತು ಚಿತ್ರ-ಪ್ರೊಸೆಸಿಂಗ್ ಆಲ್ಗಾರಿದಮ್ಗಳಲ್ಲಿ ಆದ್ಯತೆಗಳು ಕಾರ್ಯಕ್ಷಮತೆ ಮತ್ತು ಕಾರ್ಯಾಂಶವನ್ನು-significantly ಮಾಡಿವೆ.
ಪ್ರಸ್ತುತ ವ್ಯವಸ್ಥೆಗಳು ಉನ್ನತ-ಹ-resolution ಚಿತ್ರಗಳನ್ನು ಸೆರೆಹಿಡಿಯಬಹುದು, ವಾಸ್ತವ ಸಮಯದಲ್ಲಿ ಹೆಚ್ಚಿನ ಪ್ರಮಾಣದ ಚಿತ್ರ ಡೇಟಾವನ್ನು ಪ್ರಕ್ರಿಯೆಗೊಳಿಸಬಹುದು ಮತ್ತು ಕೀಲುವನ್ನು ಹೇಳುವುದು, ಸುಲಭ ಪೂರೈಸುವ ಕಾರ್ಯಗಳನ್ನು ಕೆಲವೇ ಮೂರು ಲಭ್ಯವಿರುವಲ್ಲಗಳೊಳಗೆ ನಡೆಸಬಹುದು. ಸ್ವಆಟೋ-ಫೋಕಸ್ ಮಾಡುವ ಹಕ್ಕಿಗಳು, ಉನ್ನತ-ಗತಿಯ ಚಿತ್ರ ಸಂಪಾದನೆ, ತ್ರಿಆಯಾಮಿಕ ಚಿತ್ರಿತ, ವಸ್ತು ಗುರುತಿಸುವಿಕೆ ಮತ್ತು ಅಧಿಕೃತ ಮಾಪನ ಕಾರ್ಯಗಳು ಈಗ ವ್ಯಾಪಕವಾಗಿ ಲಭ್ಯವಿವೆ.
ರೊಬೋಟಿಕ್ಗಳು ಮತ್ತು ಕೈಗಾರಿಕಾ ಸಾಮಾಜಿಕ ಕೈಗಾರಿಕೆ ಮುಂದುವರಿಯುತ್ತಿದ್ದಂತೆ, ದೃಶ್ಯ ಹಿಡಿತಗಳು ನಿರೀಕ್ಷಣೆ, ಪ್ರಮಾಣ, ರೊಬೋಟ್ ಮಾರ್ಗದರ್ಶನ, ಪ್ರಕ್ರಿಯೆ ಗಮನಾರ್ಹವಾಗಿ ನಿರ್ವಹಣೆ ಮತ್ತು ಸ್ವಾಯತ್ತ ನಿರ್ಧಾರ ತೆಗೆದುಕೊಳ್ಳುವಿಕೆಗಾಗಿ ಅವಶ್ಯಕ ಸಾಧನಗಳಾಗಿವೆ. ಇಂದೆ, ಇವು ಉತ್ಪಾದನೆ, ಉಪಕರಣ ಉತ್ಪಾದನೆ, ಆಟೋಮೋಬೈಲ್ ಅಸೆಂಬ್ಲಿ, ಲಾಜಿಸ್ಟಿಕ್, ಸೆಮಿಕಂಡಕ್ಟರ್ ನವೀಕರಣ, ವೈದ್ಯಕೀಯ ಸಾಧನ ಉತ್ಪಾದನೆ, ಮತ್ತು ಇತರ ಉನ್ನತ ಕೈಗಾರಿಕಾ ಮೇಲ್ವಿಚಾರಣೆಯಲ್ಲಿ ಪ್ರಮುಖ ಪಾತ್ರ ವಹಿಸುತ್ತವೆ.
ತೀರ್ಮಾನ
ಯಂತ್ರ ದೃಶ್ಯವು ಕೈಗಾರಿಕಾ ದೃಷ್ಟಿಯನ್ನು ಸ್ವಾಯತ್ತ ಚಿತ್ರ ವಿಶ್ಲೇಷಣೆಯೊಂದಿಗೆ ಕೈಗಾರಿಕ ಗುಣಗ್ತಾ ಬೆಳೆಯಲು, ವೇಗ ಮತ್ತು ಶಾಸನವನ್ನು ಸುಧಾರಿಸುತ್ತದೆ. ಇದುವರೆಗೆ ಕಾರ್ಯಕ್ಷಮತೆಗೆ ಸೂಕ್ತ ಬೆಳಕು, ಕ್ಯಾಮೆರಾ ಆಯ್ಕೆ, ಚಿತ್ರ ಪ್ರಕ್ರಿಯೆ, ಸಮಾಯೋಜನೆ ಮತ್ತು ವ್ಯವಸ್ಥೆ ಏಕೀಕರಣಕ್ಕೆ ಅವಲಂಬಿತವಾಗಿದೆ. ಉತ್ಪಾದನೆ ಮತ್ತು ಸ್ವಾಯತ್ತ ದಕ್ಷತೆ ಮುಂದುವರಿಯುತ್ತಿದ್ದರು, ಯಂತ್ರ ದೃಶ್ಯವು ಗುಣಮಟ್ಟದ ನಿಯಂತ್ರಣ, ದೋಷ ಕಂಡುಹಿಡಿಯುವುದು, ಪ್ರಮಾಣ, ವರ್ಗೀಕರಣ ಮತ್ತು ರೊಬೋಟ್ ಮಾರ್ಗದರ್ಶನಕ್ಕಾಗಿ ಅವಶ್ಯಕವಾಗಿದೆ.
ಸಹಜವಾಗಿ ಕೇಳಲ್ಪಡುವ ಪ್ರಶ್ನೆಗಳು [FAQ]
1. ಯಂತ್ರ ದೃಶ್ಯ ವ್ಯವಸ್ಥೆಯ ಕಾರ್ಯಕ್ಷಮತೆಯಲ್ಲಿ ಬೆಳಕು ಹೆಚ್ಚಾಗಿದ್ದು ಏಕೆ ಮುಖ್ಯವಾಗಿದೆ?
ಬೆಳಕು ಕ್ಯಾಮೆರಾವಿನಿಂದ ಹಿಡಿದ ನಿಖರವಿರುವ ಚಿತ್ರದ ಗುಣಮಟ್ಟವನ್ನು ನೇರವಾಗಿ ಪರಿಣಾಮ ಬೀರುತ್ತದೆ. ಭಾರತೀಯ ಕೋಣೆಯಾದರೂ, ಬೆಳಕಿಲ್ಲದೆಿಯಾದರೆ ದೋಷಗಳು, ಕಡೆಯವರು, ಗುರುತಿಸುವುದು ಅಥವಾ ಆಯಾಮದ ಗುಣವನ್ನು ಕುಂದಿಸಲು ಸಹ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತದೆ. ಉತ್ತಮ ಬೆಳಕು ವಿರುದ್ಧವಾಗಿ ಬೆಳವಣಿಗೆ ಮಾಡುವುದರೊಂದಿಗೆ, ಸಾಯಂಬಗಳಿಗೆ ಮತ್ತು ಪ್ರತಿಬಿಂಬಗಳನ್ನು ಕಡಿಮೆ ಮಾಡಿ, ಜೊತೆಗೆ ಪರಿಶೀಲನೆ ಮಾಡಬೇಕಾದ ಪ್ರಮುಖ ವೈಶಿಷ್ಟ್ಯಗಳನ್ನು ಹైಲಿಟ್ ಮಾಡುತ್ತದೆ. ಬಹಳಷ್ಟು ಯಂತ್ರ ದೃಶ್ಯಾದ್ಯಾಪನಗಳಲ್ಲಿ, ಬೆಳಕಿನ ವಿತರಣೆಯನ್ನು ಸುಧಾರಿಸಲು ಬಲವಾದ ಪರಿಣಾಮವನ್ನು ಪ್ರಯೋಜನ ಪಡೆುವುದಿಲ್ಲ ಹೆಚ್ಚಿನ ಒಳನೋಟಾಸಿಲೆ ಹಿಕ್ಕಲು.
2. ಯಂತ್ರ ದೃಶ್ಯ ವ್ಯವಸ್ಥೆಗಳು ಕೈಗಾರಿಕ ಪರಿಶೀಲನೆ ಫಲಿತಾಂಶಗಳನ್ನು ಹೇಗೆ ಹೆಚ್ಚು स्थಿರವಾಗಿ ಸಂಪಾದಿಸುತ್ತವೆ?
ಯಂತ್ರ ದೃಶ್ಯ ವ್ಯವಸ್ಥೆಗಳು ನಿರಂತರ ಆಮದು ಒಂದೆನೇ ಪರಾಮೇಯಗಿರುವ ಪರೀಕ್ಷಾ ನಿಯಮಗಳನ್ನು, ಪ್ರಮಾಣದ ವಿಧಾನಗಳು, ಮತ್ತು ಅಂಗೀಕಾರದ ನಿಯಮಗಳು ಸರಾಸರಿ ಪ್ರತಿಜ್ಞೆಯನ್ನು ಗ್ರಹಿಸಿ ಬೆರೆಬುಕಬಯಗಳು. ಮಾನವ ಸ್ವಾಯತ್ತಿಗಳ ಚಿಂತನೆ, ಗಮನ ಸಂಬಂಧಗಳು, ಬೆಳಕು ಇತರವುಗಳನ್ನು ಸಲ್ಲಿಸದಂತಾಗಿ, ಅವರು ನಿರೀಕ್ಷೆಯ ಯಾವುದಾದರೂ ನಿರಂತರದಲ್ಲಿಲ್ಲಿಗೋಚಿ. ಪ್ರತಿ ಚಿತ್ರ ಸಮಾನ ಆಲ್ಗಾರಿದಮ್ಗಳನ್ನು ಬಳಸಿಕೊಂಡು ವಿಶ್ಲೇಷಿಸಲಾಗುತ್ತದೆ, ಮುಂದೆ ದೋಷವನ್ನು ಹರಿವು ಎರಡನೆಯ ವರ್ಗೀಯ ಮಾದರಿಗಳನ್ನು ಉತ್ಪಾದಿಸಲು ಸಲ್ಲಿಸುತ್ತದೆ. ಈ ನಿರ್ಲಕ್ಷವು ಉತ್ಪಾದಕರಿಗೆ ಸ್ಥಿರ ಗುಣಮಟ್ಟದ ಅಂತರಗಳನ್ನು ನಿರ್ಧರಿಸಲು ಮತ್ತು ನಿರೀಕ್ಷಣೆಯಲ್ಲಿ ಅಷ್ಟೊಂದು ಎಳೆಯನು ತಲುಪುತ್ತದೆ.
3. ದೃಶ್ಯ সেন್ಸರ್ಗಳು ಸಂಪ್ರದಾಯದ ಫೋಟೋಎಲೆಕ್ಟ್ರಿಕ್ ಸೆನ್ಸರ್ಗಿಂತ ಹೆಚ್ಚಿನ ಮೀರುಂಗಾಗಿದೆಯೇ?
ಫೋಟೋಎಲೆಕ್ಟ್ರಿಕ್ ಸೆನ್ಸರ್ಗಳನ್ನು ಅನಿಯಮಿತ ಸ್ಥಳದ ವಿಷಯಾನುಕೂಲವನ್ನು ವಾಸ್ತ್ಯವಾಗುದಾಗಿ ಪರಿಶೀಲಿಸಲಾರಂಭಿಸಲಾಗಿದೆ. ದೃಶ್ಯ ಸೆನ್ಸರ್ಗಳು ಸಂಪೂರ್ಣ ಚಿತ್ರಗಳು ಹಿಡಿದುಕೊಂಡು, ಬಹು ಅಂಶಗಳನ್ನು ಏಕಕಾಲದಲ್ಲಿ ಪರಿಶೀಲಿಸುತ್ತವೆ. ಐಕೈ ಒಂದು ದೃಶ್ಯ ಸೆನ್ಸರ್ ಒಂದು ಪರಿಶೀಲನೆ ಚಕ್ರದ ವೃತ್ತಿ, ವಿಧಾನ, ಸ್ಥಳಜ್ಞಾನ, ದಿಕ್ಕು, ಬಣ್ಣ, ಗುರುತಿಸುವಿಕೆ, ಮತ್ತು ಮೇಲ್ಮಟ್ಟದ ಸ್ಥಿತಿಗಳನ್ನು ಪರಿಶೀಲಿಸಬಲ್ಲದು. ಮೇಲೆ ಭಾವನೆ, ಪರಿಶೀಲನೆ ಪರಿಕರಗಳನ್ನು ಸಾಫ್ಟ್ವೇರ್ ನವೇದುಗಳಲ್ಲಿ ಸಮಾಯೋಜನೆಗಳನ್ನು ತಿದೆ; ಆದ್ದರಿಂದ ದೃಶ್ಯ ಸೆನ್ಸರ್ಗಳು ಉತ್ಪನ್ನ ಬದಲಾವಣೆಗಳು ಮತ್ತು ಕೈಗಾರಿಕ ಬದಲಾವಣೆಗಳಿಗೆ ಗಮನಾರ್ಹವಾಗಿ ಹೆಚ್ಚಿನ ಪ್ರಮಾಣ ವಿನ್ಯಾಸವನ್ನು ಸ್ಥಿತಿಯಲ್ಲಿ ಹೆಚ್ಚಿಸಲು ಅತ್ಯಂತ ಹೊಂದುವಂತೆ ತಲುಪುತ್ತವೆ.
4. ಯಂತ್ರ ದೃಶ್ಯವು ರೊಬ್ಬೋಟ್ ಮಾರ್ಗದರ್ಶನ ಮತ್ತು ಸ್ವಾಯತ್ತ manufacturing ಕಾರ್ಯಗಳಲ್ಲಿ ಏನು ನೆರವು ನೀಡುತ್ತದೆ?
ಯಂತ್ರ ದೃಶ್ಯವು ರೊಬೋಟ್ಗಳಿಗೆ ವಸ್ತು ಸ್ಥಳ, ದಿಕ್ಕು, ಆಯಾಮ ಮತ್ತು ಏಕೀಕರಣಗಳ ಕುರಿತು ನಿಖರ ಮಾಹಿತಿಯನ್ನು ಒದಗಿಸುತ್ತದೆ. ಚಿತ್ರವನ್ನು ಸೆರೆಹಿಡಿದ ನಂತರ ಮತ್ತು ಪ್ರಕ್ರಿಯೆಗೊಳಿಸುವ ನಂತರ, ದೃಶ್ಯ ವ್ಯವಸ್ಥೆ ತ್ರಿಜ್ಯಗಳನ್ನು ಲೆಕ್ಕಹಿಡಿದು ಮತ್ತು ಈ ಮಾಹಿತಿಯನ್ನು ರೊಬೋಟ್ ನಿಯಂತ್ರಕನಿಗೆ ಕಳುಹಿಸುತ್ತದೆ. ರೊಬೋಟ್ ನಂತರ ತಮ್ಮ ಚಲನೆಗಳನ್ನು ಸಮನ್ವಯಗೊಳ್ಳಿ, ಬಂಡಿ ಚಲನೆಗಳು, ಅಸೆಂಬ್ಲಿ, ವರ್ಗೀಕರಣ, ಪ್ಯಾಕೇಜಿಂಗ್ ಅಥವಾ ಗುಣಮಟ್ಟದ ಪರಿಶೀಲನೆ ಹಾಗೂ ನೀವು ಬ್ಲಾಕ್ ಮಾಡುತ್ತಾ. ಈ ಸಾಮರ್ಥ್ಯವೆಂದರೆ ಸ್ವಾಯತ್ತ ವ್ಯವಸ್ಥೆ ಉತ್ತಮವಾಗಿ ಹೆಚ್ಚು ಪ್ರಮಾಣವನ್ನು ನಿರ್ವಹಿಸಲು ಸಹಾಯ ಮಾಡುತ್ತದೆ.
5. ಯಂತ್ರ ದೃಶ್ಯವು ಉದ್ಯೋಗಗಳಿಗೆ, ಕೃಷಿ, ಆರೋಗ್ಯ ಸಂಶೋಧನೆ ಮತ್ತು ಸಾರಿಗೆ ಕ್ಷೇತ್ರದಲ್ಲಿ ಹೆಚ್ಚು ಪ್ರಮುಖವಾಗುತ್ತಿದೆ ಯಾಕೆ?
ಯಂತ್ರ ದೃಶ್ಯವು ಚಿತ್ರ ಪಡೆಯುವಿಕೆ, ಸ್ವಾಯತ್ತ ವಿಶ್ಲೇಷಣೆ, ಅಳತೆಯ ನಿಖರ ಮತ್ತು ನಿರ್ಧಾರಗಳನ್ನು ಒದಗಿಸುತ್ತದೆ. ಉತ್ಪಾದನೆಯಂತು, ಇದೀಗ ಗುಣಮಟ್ಟದ ನಿಯಂತ್ರಣ ಮತ್ತು ಉತ್ಪಾದನೆ ಸಚಿವ ವಿಡಿಯರನ್ನು ಬಳಸುದ್ಧಾರಣಗೊಳ್ಳುತ್ತದೆ. ಕೃಷಿಯ ನಿರ್ಧಾರಕ್ಕೆ, ಇದು ಬೆಳೆಯ ಮುಖ್ಯ ಅಂಶವನ್ನು ಪರಿಶೀಲಿಸಲು ಮತ್ತು ಉತ್ಪನ್ನಗಳನ್ನು ವಿಶ್ಲೇಷಿಸಲು ಉತ್ತೇಜನ ನೀಡುತ್ತದೆ. ಆರೋಗ್ಯದಲ್ಲಿ, ವೈದ್ಯಕೀಯ ಚಿತ್ರಿತ ವಿಚಾರಗಳು, ದೃಶ್ಯವಾಗಿ ದೈಹಿಕಗಳ ಮಿತಿಯ ವಿವರಗಳನ್ನು 제공합니다. ಸಾರಿಗೆ ಕ್ಷೇತ್ರದಲ್ಲಿ, ಇದು ಸಾರಿಗೆ ಸಾಧ್ಯವಾಗುವಾಗ ಮತ್ತು ಲೈಸೆನ್ಸ್ ಚನನೆಗೆ ಸಹಾಯಿಸುತ್ತದೆ. ಯಂತ್ರ ದೃಶ್ಯವು ಹೆಚ್ಚಿನ ಪ್ರಮಾಣದ ದೃಶ್ಯ ಮಾಹಿತಿಯನ್ನು ಶೀಘ್ರವಾಗಿ, ನಿಖರವಾಗಿ ಮತ್ತು ಸ್ಥಿತಿಯಲ್ಲಿ ಪ್ರಕ್ರಿಯೆಗೊಳಿಸಲು ಸಾಧ್ಯವಾಗುತ್ತದೆ; ಹೀಗಾಗಿ, ಇದು ಪರಿಣಾಮಕಾರಿತ್ವ, ಪರಿಶೀಲನೆ, ಗಮನಾರ್ಹತೆಗೆ ಮತ್ತು ಸಮರ್ಥ ಕೀ ಡೇಟಾಗೆ ಅತ್ಯಂತ ಪ್ರಮುಖ ತಂತ್ರಜ್ಞಾನವಾಗಿದೆ.
ಸಂಬಂಧಿತ ಬ್ಲಾಗ್
-
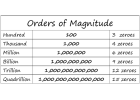
ಮಿಲಿಯನ್, ಬಿಲಿಯನ್, ಟ್ರಿಲಿಯನ್ ನಲ್ಲಿ ಎಷ್ಟು ಸೊನ್ನೆಗಳು?
![ಮಿಲಿಯನ್, ಬಿಲಿಯನ್, ಟ್ರಿಲಿಯನ್ ನಲ್ಲಿ ಎಷ್ಟು ಸೊನ್ನೆಗಳು?]()
2024/07/29
ಮಿಲಿಯನ್ 10 ಅನ್ನು ಪ್ರತಿನಿಧಿಸುತ್ತದೆ6, ದೈನಂದಿನ ವಸ್ತುಗಳು ಅಥವಾ ವಾರ್ಷಿಕ ಸಂಬಳಕ್ಕೆ ಹೋಲಿಸಿ... -
Irlz44n mosfet ಡೇಟಶೀಟ್, ಸರ್ಕ್ಯೂಟ್, ಸಮಾನ, ಪಿನೌಟ್
![Irlz44n mosfet ಡೇಟಶೀಟ್, ಸರ್ಕ್ಯೂಟ್, ಸಮಾನ, ಪಿನೌಟ್]()
2024/08/28
ಐಆರ್ಎಲ್ Z ಡ್ 44 ಎನ್ ವ್ಯಾಪಕವಾಗಿ ಬಳಸಲಾಗುವ ಎನ್-ಚಾನೆಲ್ ಪವರ್ ಮಾಸ್ಫೆಟ್ ಆಗಿದೆ.ಅದರ ಅತ್ಯುತ್ತ... -
ಬ್ಯಾಟರಿ ತಾಪಮಾನವು ತುಂಬಾ ಕಡಿಮೆ, ಚಾರ್ಜಿಂಗ್ ನಿಂತುಹೋಯಿತು.ಅದನ್ನು ಹೇಗೆ ಸರಿಪಡಿಸುವುದು?
![ಬ್ಯಾಟರಿ ತಾಪಮಾನವು ತುಂಬಾ ಕಡಿಮೆ, ಚಾರ್ಜಿಂಗ್ ನಿಂತುಹೋಯಿತು.ಅದನ್ನು ಹೇಗೆ ಸರಿಪಡಿಸುವುದು?]()
2024/10/6
ಮೊಬೈಲ್ ಫೋನ್ ಬ್ಯಾಟರಿ ಚಾರ್ಜಿಂಗ್ ಸಮಸ್ಯೆಗಳು ಸಾಮಾನ್ಯವಾಗಿದೆ ಆದರೆ ಪರಿಣಾಮಕಾರಿಯಾಗಿ ನಿರ್ವ... -
BC547 ಟ್ರಾನ್ಸಿಸ್ಟರ್ ಸಮಗ್ರ ಮಾರ್ಗದರ್ಶಿ
![BC547 ಟ್ರಾನ್ಸಿಸ್ಟರ್ ಸಮಗ್ರ ಮಾರ್ಗದರ್ಶಿ]()
2024/07/4
BC547 ಟ್ರಾನ್ಸಿಸ್ಟರ್ ಅನ್ನು ಸಾಮಾನ್ಯವಾಗಿ ವಿವಿಧ ಎಲೆಕ್ಟ್ರಾನಿಕ್ ಅಪ್ಲಿಕೇಶನ್ಗಳಲ್ಲಿ ಬಳಸಲಾ... -
ಮಲ್ಟಿಪ್ಲೆಕ್ಸರ್ಗಳಿಗೆ ಸಂಪೂರ್ಣ ಮಾರ್ಗದರ್ಶಿ ಮತ್ತು ಡಿಜಿಟಲ್ ಸಿಸ್ಟಮ್ಗಳಲ್ಲಿ ಅವುಗಳ ಪಾತ್ರ
![ಮಲ್ಟಿಪ್ಲೆಕ್ಸರ್ಗಳಿಗೆ ಸಂಪೂರ್ಣ ಮಾರ್ಗದರ್ಶಿ ಮತ್ತು ಡಿಜಿಟಲ್ ಸಿಸ್ಟಮ್ಗಳಲ್ಲಿ ಅವುಗಳ ಪಾತ್ರ]()
2025/09/20
ಮಲ್ಟಿಪ್ಲೆಕ್ಸರ್ಗಳು ಡಿಜಿಟಲ್ ಸಿಸ್ಟಮ್ಗಳಲ್ಲಿನ ಘಟಕಗಳಾಗಿವೆ, ಬೈನರಿ ಲಾಜಿಕ್ ಮತ್ತು ಕಂಟ್ರ... -
ಎಸ್ಸಿಆರ್ಗೆ ಸಮಗ್ರ ಮಾರ್ಗದರ್ಶಿ (ಸಿಲಿಕಾನ್ ನಿಯಂತ್ರಿತ ರಿಕ್ಟಿಫೈಯರ್)
![ಎಸ್ಸಿಆರ್ಗೆ ಸಮಗ್ರ ಮಾರ್ಗದರ್ಶಿ (ಸಿಲಿಕಾನ್ ನಿಯಂತ್ರಿತ ರಿಕ್ಟಿಫೈಯರ್)]()
2024/04/22
ಸಿಲಿಕಾನ್ ನಿಯಂತ್ರಿತ ರಿಕ್ಟಿಫೈಯರ್ಗಳು (ಎಸ್ಸಿಆರ್), ಅಥವಾ ಥೈರಿಸ್ಟರ್ಗಳು, ಪವರ್ ಎಲೆಕ್ಟ್ರ... -
LR621, SR621WS, 364, AG1 ಬ್ಯಾಟರಿ ಸಮಾನ ಮತ್ತು ಬದಲಿಗಳು
![LR621, SR621WS, 364, AG1 ಬ್ಯಾಟರಿ ಸಮಾನ ಮತ್ತು ಬದಲಿಗಳು]()
2024/07/15
ಕೈಗಡಿಯಾರಗಳು, ಸಣ್ಣ ಆಟಿಕೆಗಳು, ಕ್ಯಾಲ್ಕುಲೇಟರ್ಗಳು ಮತ್ತು ರಿಮೋಟ್ ಕೀಲಿಗಳಂತಹ ಕಾಂಪ್ಯಾಕ್ಟ... -
ಆಪ್-ಆಂಪ್ ಸರ್ಕ್ಯೂಟ್ಗಳ ಮೂಲಭೂತ ಅಂಶಗಳು
![ಆಪ್-ಆಂಪ್ ಸರ್ಕ್ಯೂಟ್ಗಳ ಮೂಲಭೂತ ಅಂಶಗಳು]()
2023/12/28
ಎಲೆಕ್ಟ್ರಾನಿಕ್ಸ್ನ ಸಂಕೀರ್ಣ ಜಗತ್ತಿನಲ್ಲಿ, ಅದರ ರಹಸ್ಯಗಳಿಗೆ ಒಂದು ಪ್ರಯಾಣವು ಏಕರೂಪವಾಗಿ ನ... -
NMOS ಮತ್ತು PMOS ವ್ಯತ್ಯಾಸಗಳು ಮತ್ತು ಅಪ್ಲಿಕೇಶನ್ಗಳನ್ನು ಹೋಲಿಸುವುದು
![NMOS ಮತ್ತು PMOS ವ್ಯತ್ಯಾಸಗಳು ಮತ್ತು ಅಪ್ಲಿಕೇಶನ್ಗಳನ್ನು ಹೋಲಿಸುವುದು]()
2024/11/15
ದಕ್ಷ ಸರ್ಕ್ಯೂಟ್ಗಳನ್ನು ವಿನ್ಯಾಸಗೊಳಿಸುವಲ್ಲಿ NMOS ಮತ್ತು PMOS ಟ್ರಾನ್ಸಿಸ್ಟರ್ಗಳ ನಡುವಿನ ವ್... -
ಸಿಆರ್ 2450 ವರ್ಸಸ್ ಸಿಆರ್ 2032 ಹೋಲಿಕೆ: ನೀವು ತಿಳಿದುಕೊಳ್ಳಬೇಕಾದದ್ದು
![ಸಿಆರ್ 2450 ವರ್ಸಸ್ ಸಿಆರ್ 2032 ಹೋಲಿಕೆ: ನೀವು ತಿಳಿದುಕೊಳ್ಳಬೇಕಾದದ್ದು]()
2025/09/15
ಸಿಆರ್ 2450 ಮತ್ತು ಸಿಆರ್ 2032 ನಂತಹ ಬಟನ್ ಬ್ಯಾಟರಿಗಳು ಕೈಗಡಿಯಾರಗಳು ಮತ್ತು ರಿಮೋಟ್ಗಳಿಂದ ಹಿಡಿ...




ಹಾಟ್ ಭಾಗಗಳು
- HMC478ST89ETR
- RT0805BRE0782RL
- MTV212GMV64I
- 1812CA200KAT1A
- XC5VSX95T-2FFG1136I
- GRM1885C1H4R8CA01D
- M54133FP
- ZL30156GGGENG2
- TSA5520T/C3
- SKM200GB123D
- NVP1118B
- HC-SN300V4B15
- EPM5128LC-1
- GRM1555C1E7R3DA01D
- TL2276MT
- CL10B472KB8SFNC
- TLC7701IPW
- V48C24C50AL
- TNPW0603280KBETA
- TMS320C6670ACYP2
- TAP476M025BRW
- SKIIP11NAC063IT42
- F751C686KCC
- LD053C473KAB2A
- INA125U/2K5
- S908AS60ADIVFNER
- RY612012
- SP3222EUET
- 12105C105KAZ2A
- MC56F84766VLK
- CDSOT23-T12LC
- UPD789860MC-036-5A4-E1
- 7MBP150RA120-55
- PCF8523T/1
- TPS54880PWP
- VCT49X3F-F2-000
- MAX6709MUB+T
- T491D337M006ZT
- VI-J0Y-CY
- T494A334K035AT
- EL8300ES
- OPA4237UA
- RKT555G406F
- UPD703211ZGC-101-8BT
- D2422B0P0VQAVBH2
- AD5200BRM10-REEL7
- T30W-ZP-A3
- IM05-1B5PSVT0S
- MPM3683GQN-7
- MT29KZZZ4D4TGFAK-5